8월 24일 test
단점
- slam map 생성시에 많은 리소스가 필요하다.
- map 생성시에 scene이 너무 넓어지면 ram 용량이 감당하지 못할 수 도 있다.
예상 해결책 : WildGS 실행 과정에서 mono depth estimation 하는 과정을 depth camera로 대체한다.
- map 생성시에 scene이 너무 넓어지면 ram 용량이 감당하지 못할 수 도 있다.
반복되는 scene에서 image retrieval 능력이 떨어지는 경우가 있다.
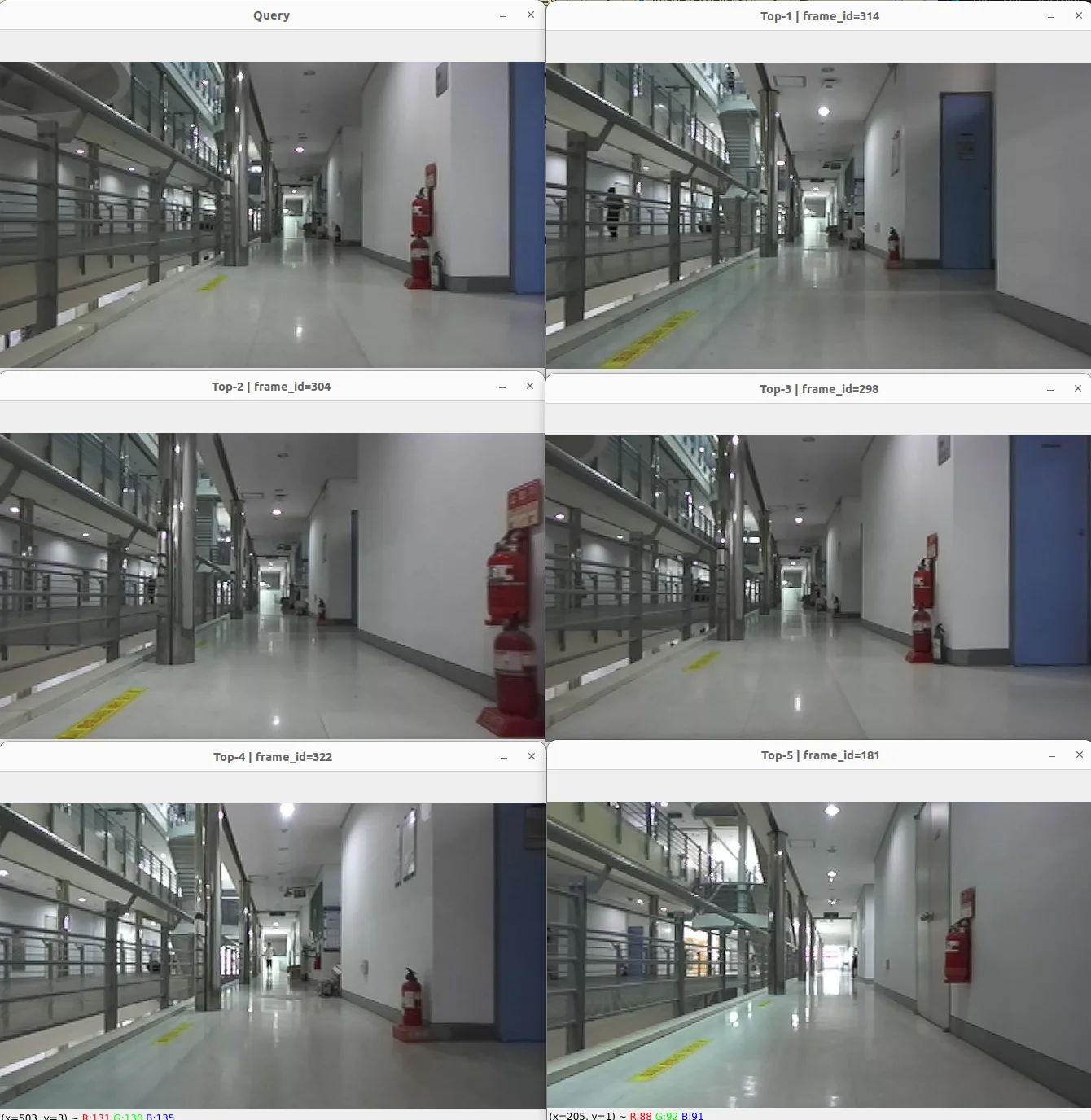
image retrieval 과정에서 단순한 dinov2 벡터의 cosine similiarity 뿐만 아니라 geometrycal한 정합성 까지 고려하여 image를 선별한다.
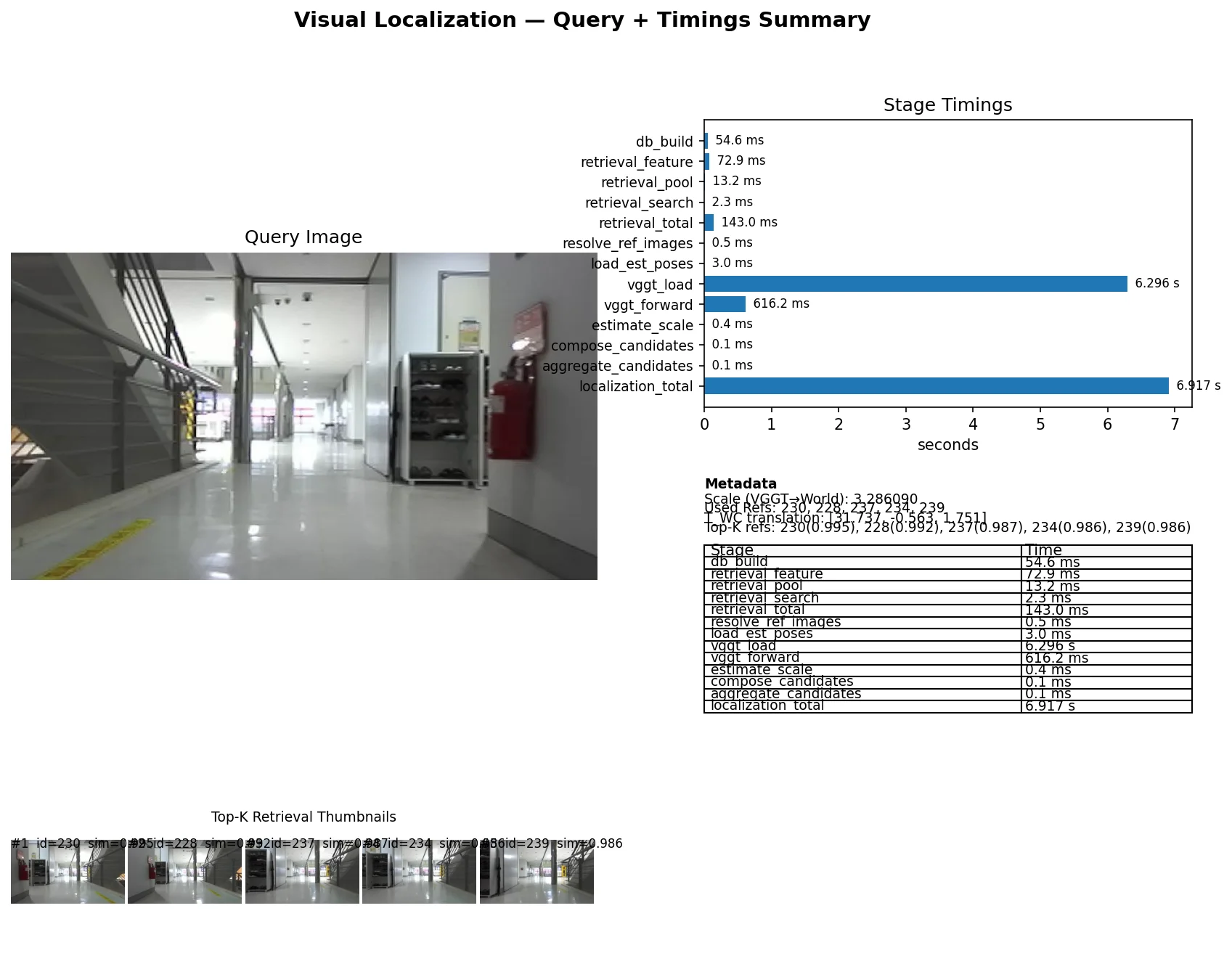
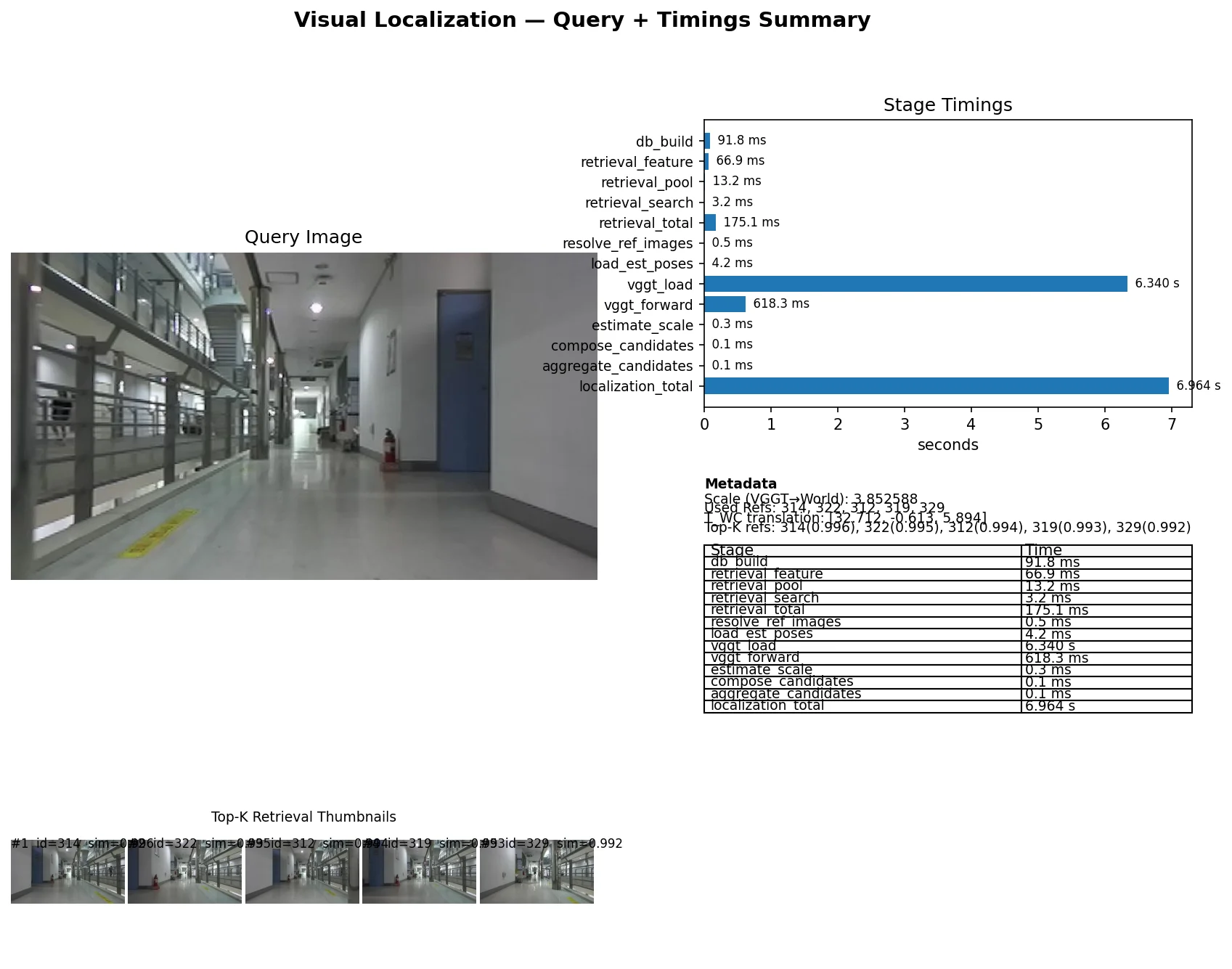
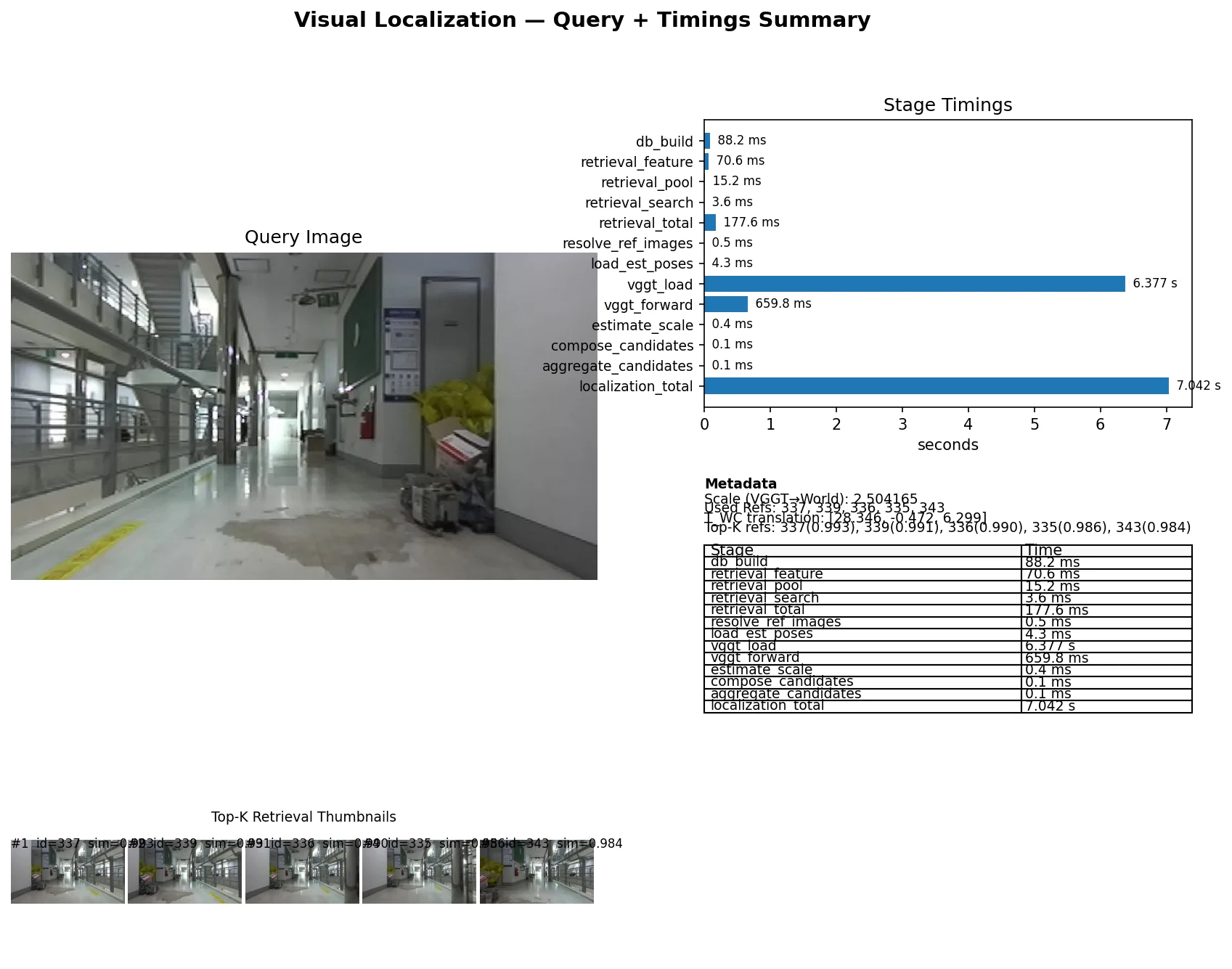
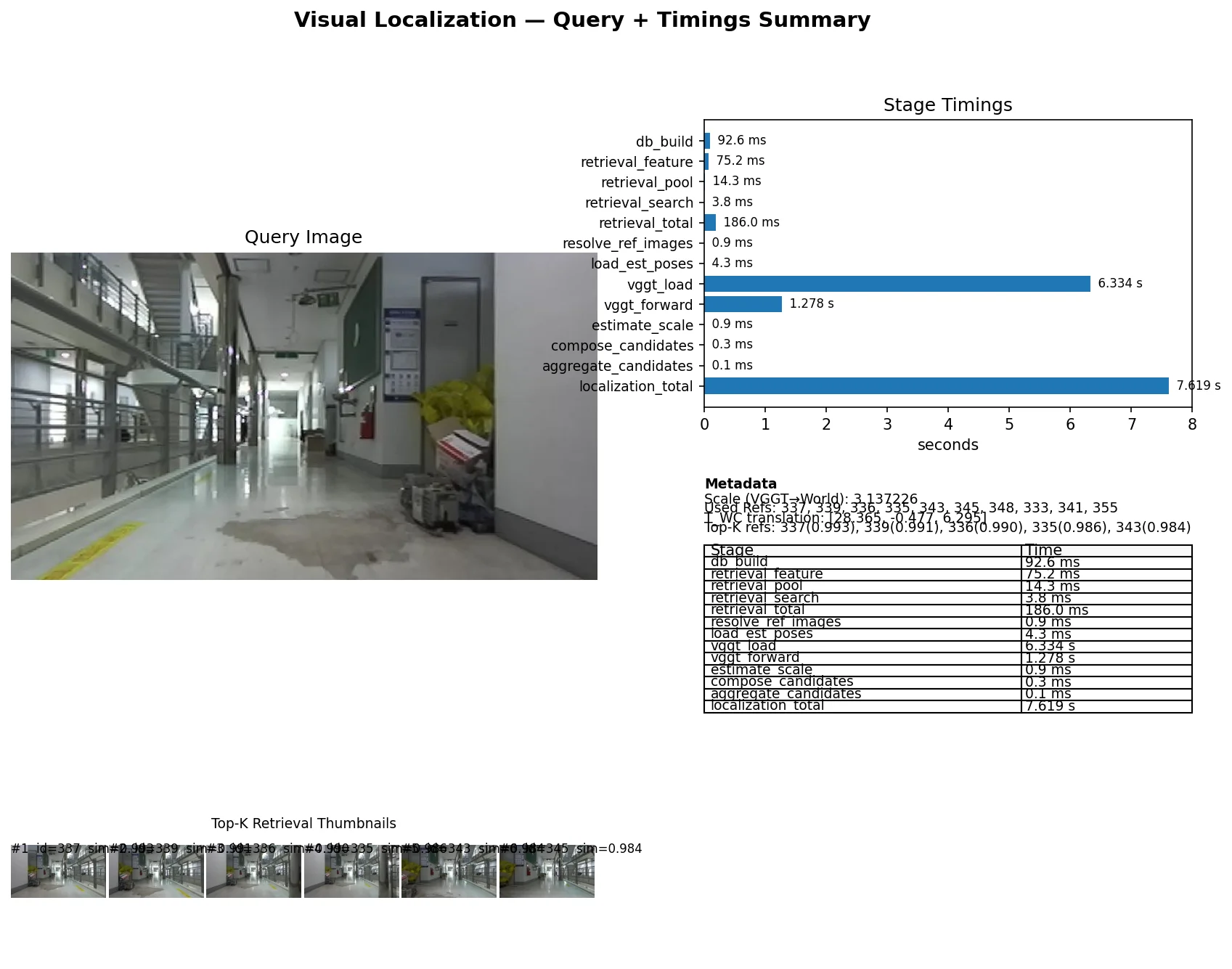
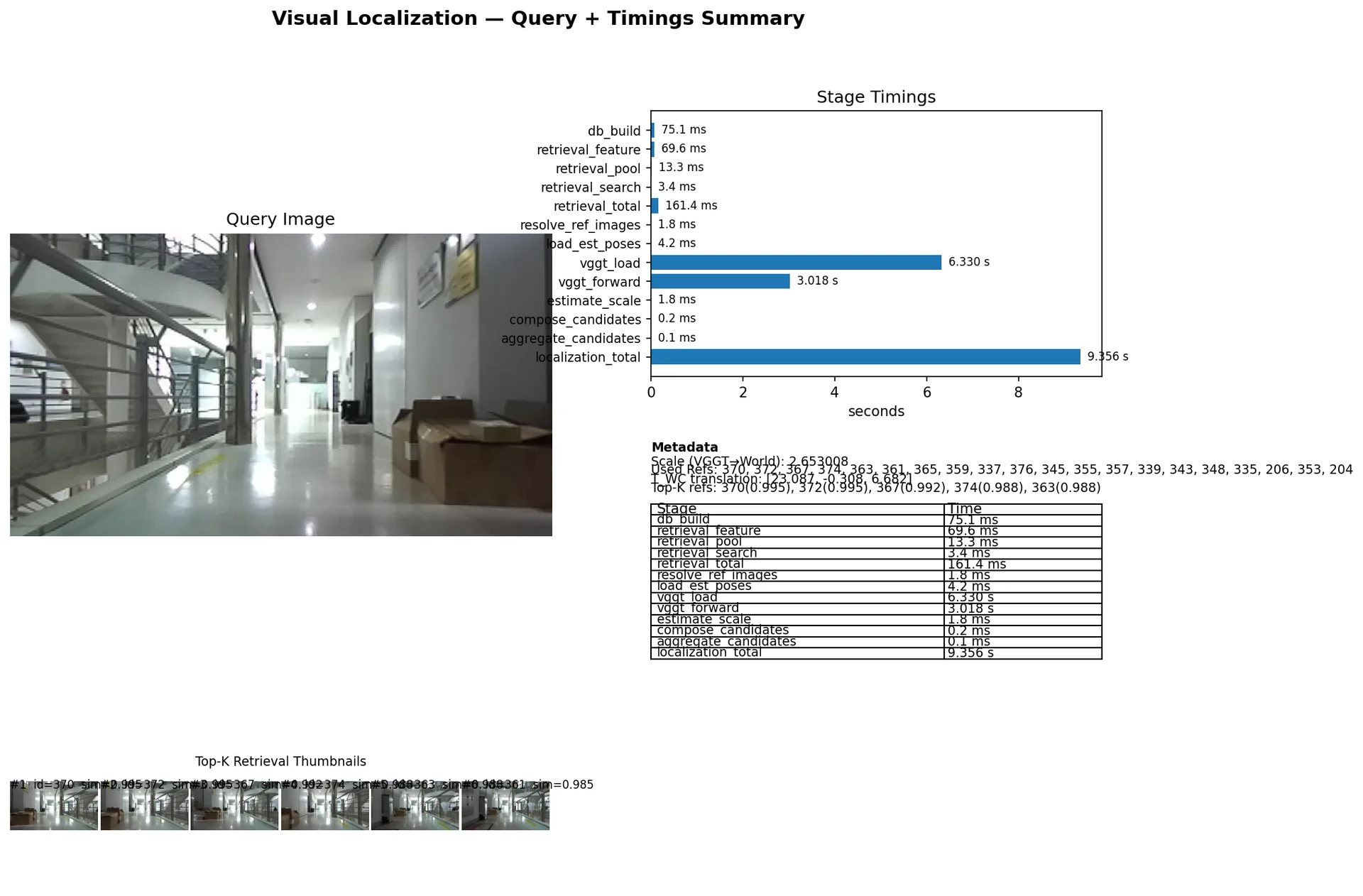
- vggt 모델 로드에 많은 시간이 걸린다 → ros 노드로 서비스 형식으로 요청이 들어올때 카메라 pose를 반환해주는 식으로 하면 꽤 빠른 런타임에 작업을 수행할 수 잇을것
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.