[Unist 복원 프로젝트] Part 6. Mid360s IMU quality
[Unist 복원 프로젝트] Part 6. Mid360s IMU quality
IMU quality 분석
IMU의 퀄리티를 분석하는 것으로는 크게 정적 분석과 동적인 분석으로 나눌 수 있게 된다.
정적인 분석으로는 아래와 같은 분석이 있다.
정적분석
노이즈 레벨(White Noise) 확인:
움직임이 전혀 없는데도 가속도나 자이로 값이 계속 변한다면 노이즈가 심한 것이다.. 보통 raw 데이터를 그래프(Plot)로 띄워놓고 진폭이 얼마나 되는지 확인한다.
바이어스(Bias) 측정: 수평이 완벽한 곳에 뒀을 때 가속도 $z$축이 $9.81m/s^2$ (혹은 $1g$)에 가깝게 나오는지, 그리고 자이로스코프의 3축 값이 모두 0에 수렴하는지 확인해본다. 0에서 벗어난 정도가 ‘Bias’이며, 이게 크면 나중에 로봇이 가만히 있어도 한쪽으로 흐르는 Drift 현상이 발생하게된다.
- IMU의 예제 데이터
- IMU topic ```bash ros2 topic echo /livox/imu –once header: stamp: sec: 1778499862 nanosec: 765184222 frame_id: livox_frame orientation: x: 0.0 y: 0.0 z: 0.0 w: 1.0 orientation_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0 angular_velocity: x: -0.03331834077835083 y: 0.015504890121519566 z: 0.004326723515987396 angular_velocity_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0 linear_acceleration: x: -0.01059205736964941 y: -0.0040344963781535625 z: 0.9981179237365723 linear_acceleration_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
0.0
```
- 수평으로 가만히 놓았을때 가속도의 z값이 1g에 가깝게 나오는 것을 확인할 수 있다.
- 움직임이 없기 때문에 각속도 성분이 모두 0에 가깝게 나오는 것을 확인할 수 있다.
- IMU topic ```bash ros2 topic echo /livox/imu –once header: stamp: sec: 1778499862 nanosec: 765184222 frame_id: livox_frame orientation: x: 0.0 y: 0.0 z: 0.0 w: 1.0 orientation_covariance:
Allan Variance (알란 분산) 분석: 약 1시간 이상 데이터를 가만히 받아 Allan Variance 그래프를 그려보는 것이 좋다. 이를 통해 해당 센서의 Random Walk와 Bias Instability 같은 핵심 파라미터를 정밀하게 추출할 수 있다.
- 2시간 정도의 정적 데이터
- bag info
1 2 3 4 5 6 7 8 9 10 11
ros2 bag info imu_2h/ Files: imu_2h_0.db3 Bag size: 532.6 MiB Storage id: sqlite3 Duration: 7109.139410828s Start: May 11 2026 07:15:31.464983152 (1778498131.464983152) End: May 11 2026 09:14:00.604393980 (1778505240.604393980) Messages: 1421805 Topic information: Topic: /livox/imu | Type: sensor_msgs/msg/Imu | Count: 1421805 | Serialization Format: cdr- 1421805개의 메세지로 초당 토픽의 개수가 약 199.998hz에 달하는 것을 확인할 수 있다.
- bag info
Allan Variance
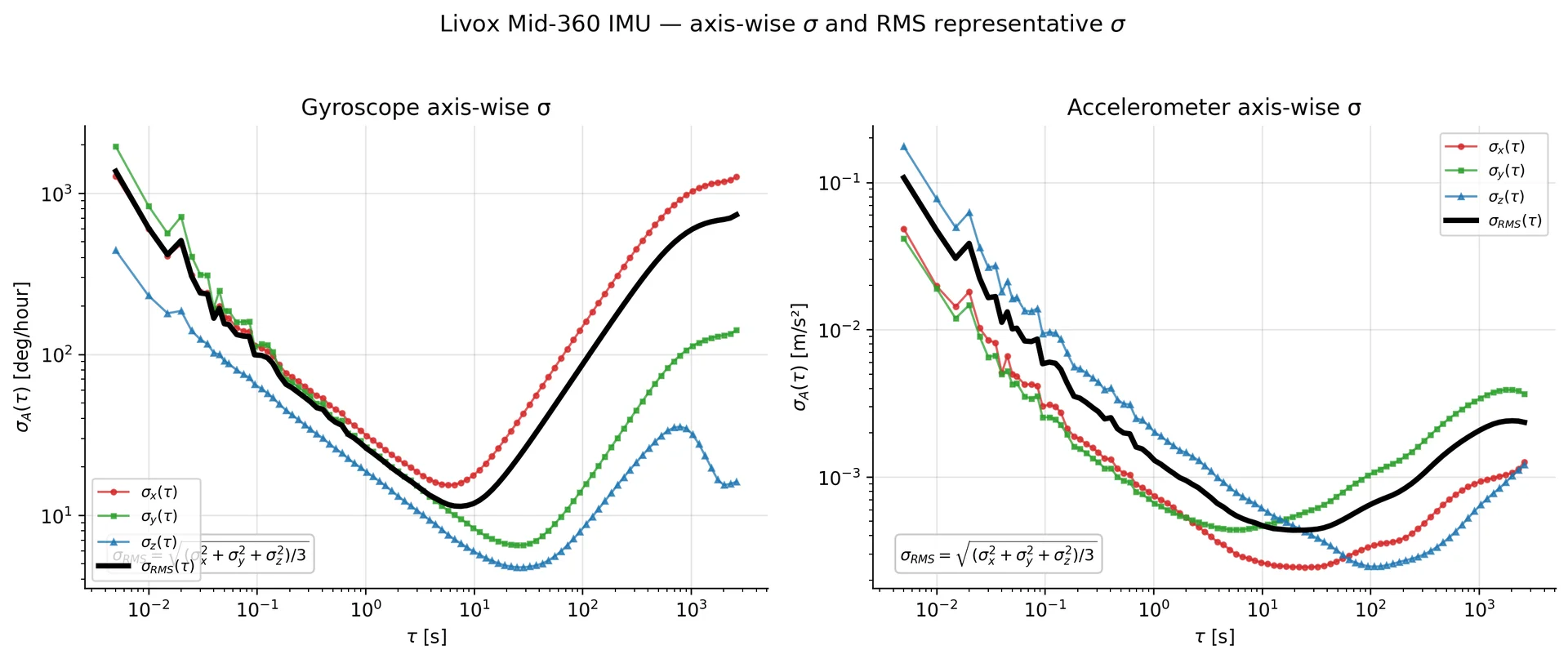
- 각 축마다 편차가 있지만 (z축의 시간 당 noise가 가장 작다) 11.5deg/hour 의 틀어짐이 있다고 볼 수 있다.
- 시간이 지남에 따라서 각도 오차가 심각하게 벌어지게 되는것을 확인할 수 있다.
- $\text{RMS} = {\sqrt{\sigma_x^2+\sigma_y^2+\sigma_z^2\over3 }}$ 이다.
- 다른 IMU의 Allan 분석
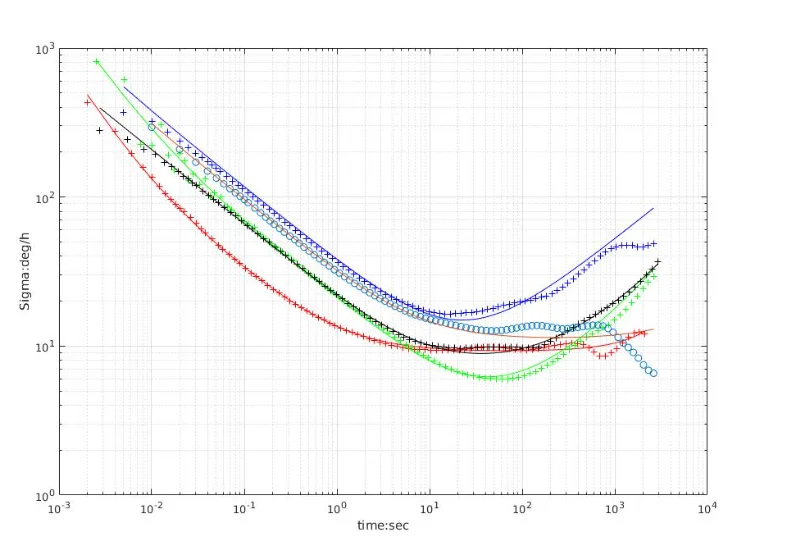
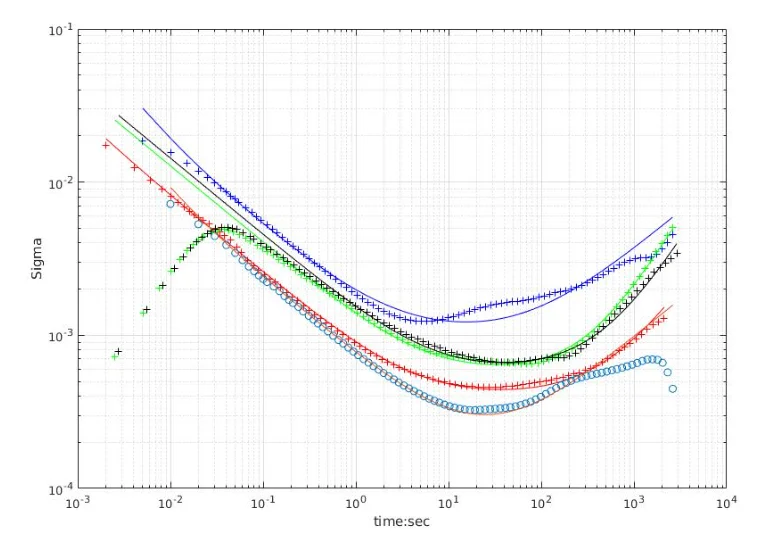
- blue : Vi-Sensor, ADIS16448,
200Hz - red : 3dm-Gx4,
500Hz - green : DJI-A3,
400Hz - black : DJI-N3,
400Hz - circle : xsens-MTI-100,
100Hz
동적분석
- 동적 분석에서는 특정 축만 회전 시켜서 다른 축에 변화가 있는지 확인하는 실험
- 테스트시에 특정 축만 흔들어주는것이 거의 불가능 하므로 일단은 포기한다.
- imu를 원점에서 시작해서 공중에서 8자로 마구 흔든 후에 다시 원점에 복귀했을때 0값에서 얼마나 틀어졌는지 확인하는 원점 회귀 분석이 있다.
기준점을 두고 공중에서 livox lidar를 8자로 흔들어보았다.
이후 plot juggler를 통해서 적분 필터를 씌워 실제 각도의 drift가 얼마나 발생하였는지를 확인하였다.
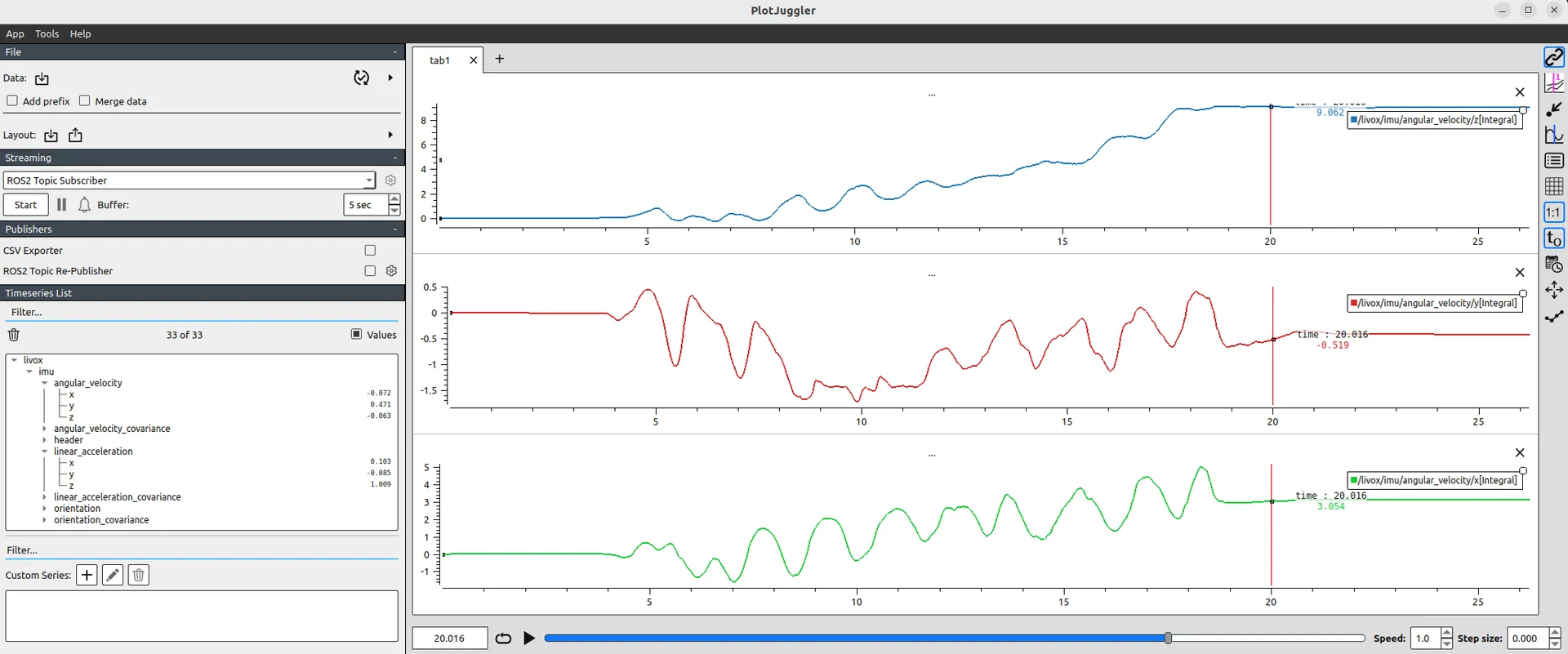
- x축으로 3도, y축으로 0.5도, z축으로 9도 정도 틀어짐을 확인할 수 있었다. 20초 동안 흔들었음에도 최대 9도까지밖에 틀어지지 않은것은 보정이 없을때의 적분오차가 발생함을 감안하면 상당히 괜찮은 결과라고 생각한다.
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.