Task[Unist 복원 프로젝트] Part 5. Camera Lidar Sensor 동기화
Task[Unist 복원 프로젝트] Part 5. Camera Lidar Sensor 동기화
데이터 동기화
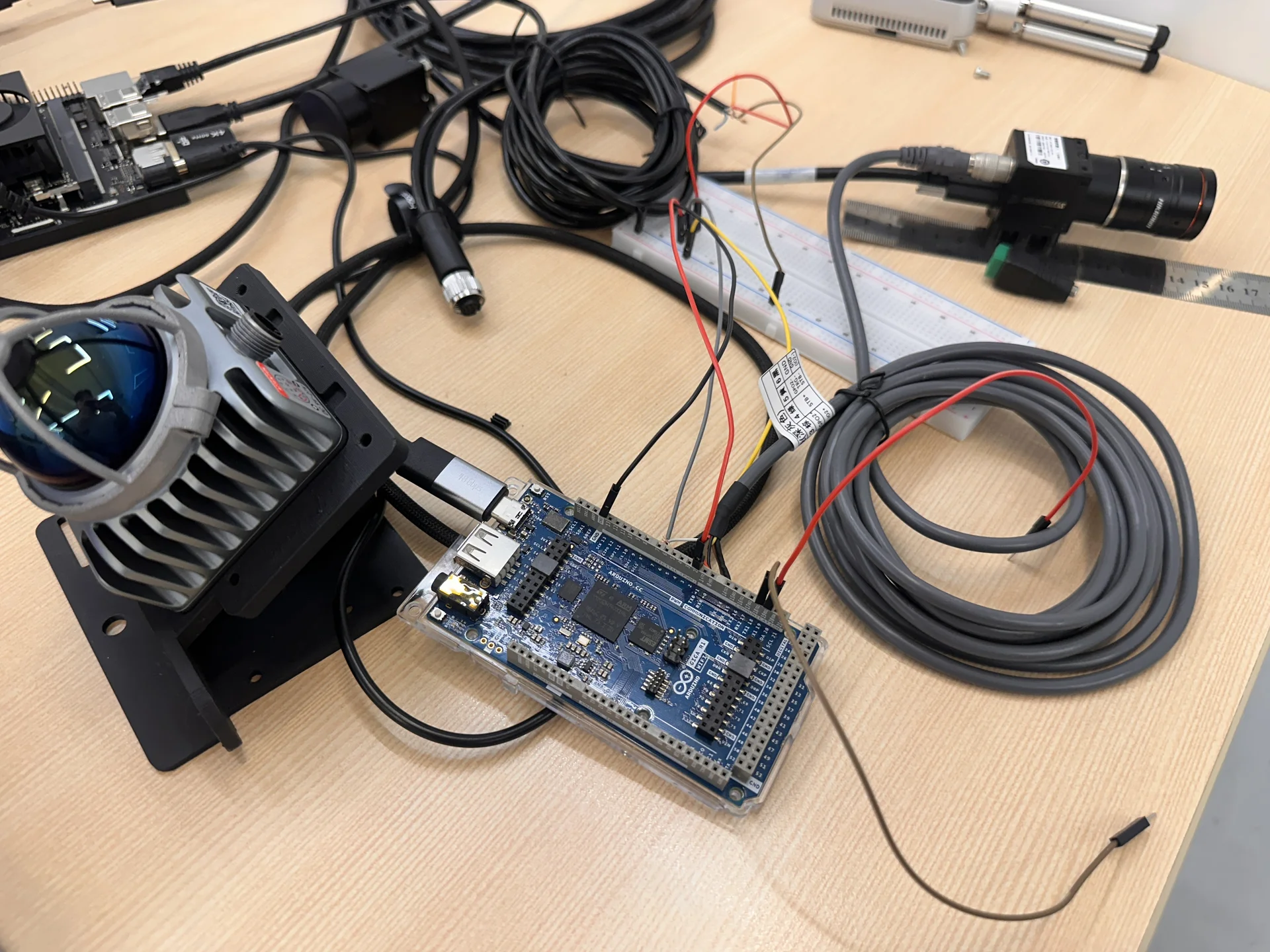
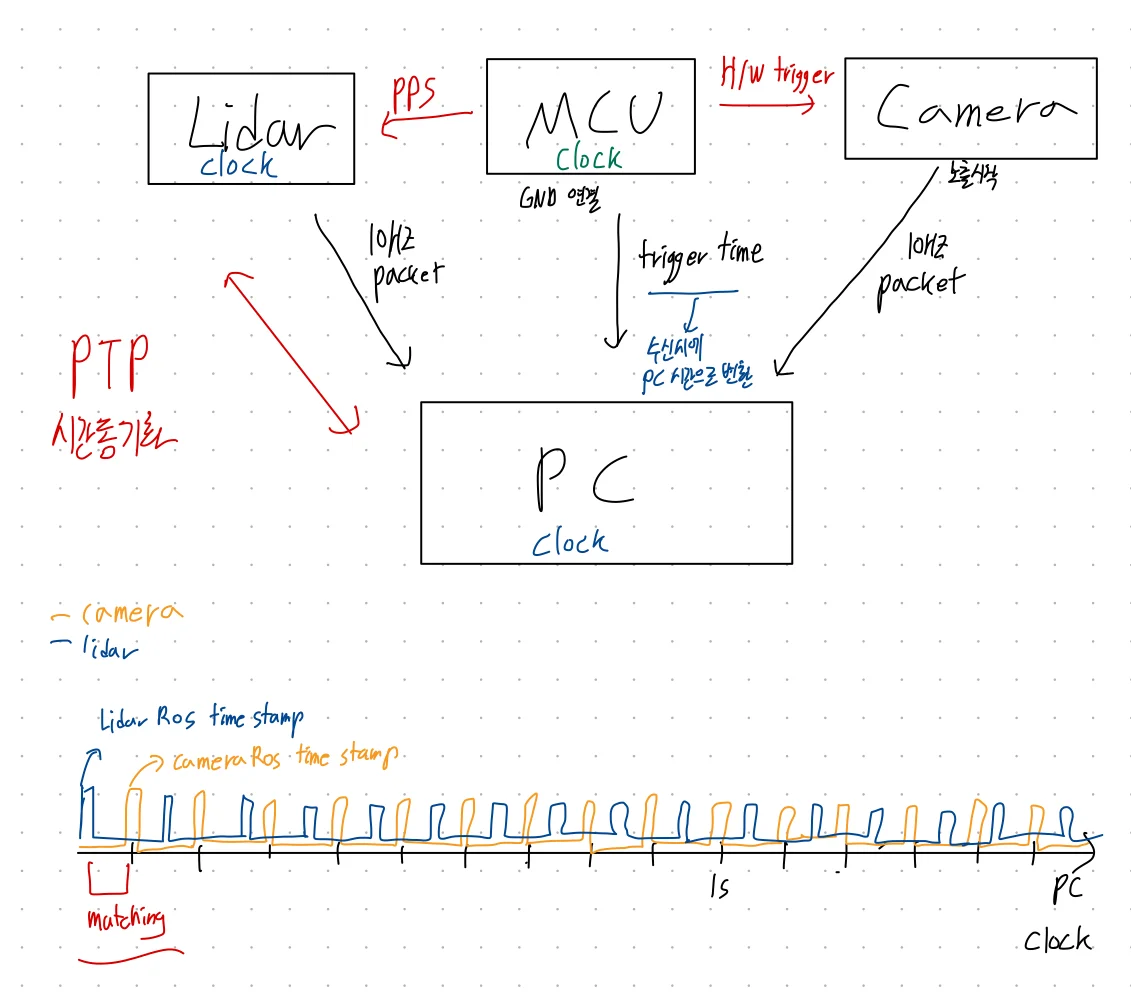
- 데이터 동기화란 여러가지 센서 값을 한번에 처리할때 외부에서 harware trigger를 지원하는 센서같은 경우에는 하나의 MCU로 외부 입력을 주어 동일한 시간에 센서가 값을 내보내도록 할 수 있다. 나같은 경우에 사용하는 mid360s나 d455, hikrobot같은 머신비전 카메라는 외부 트리거를 지원한다.
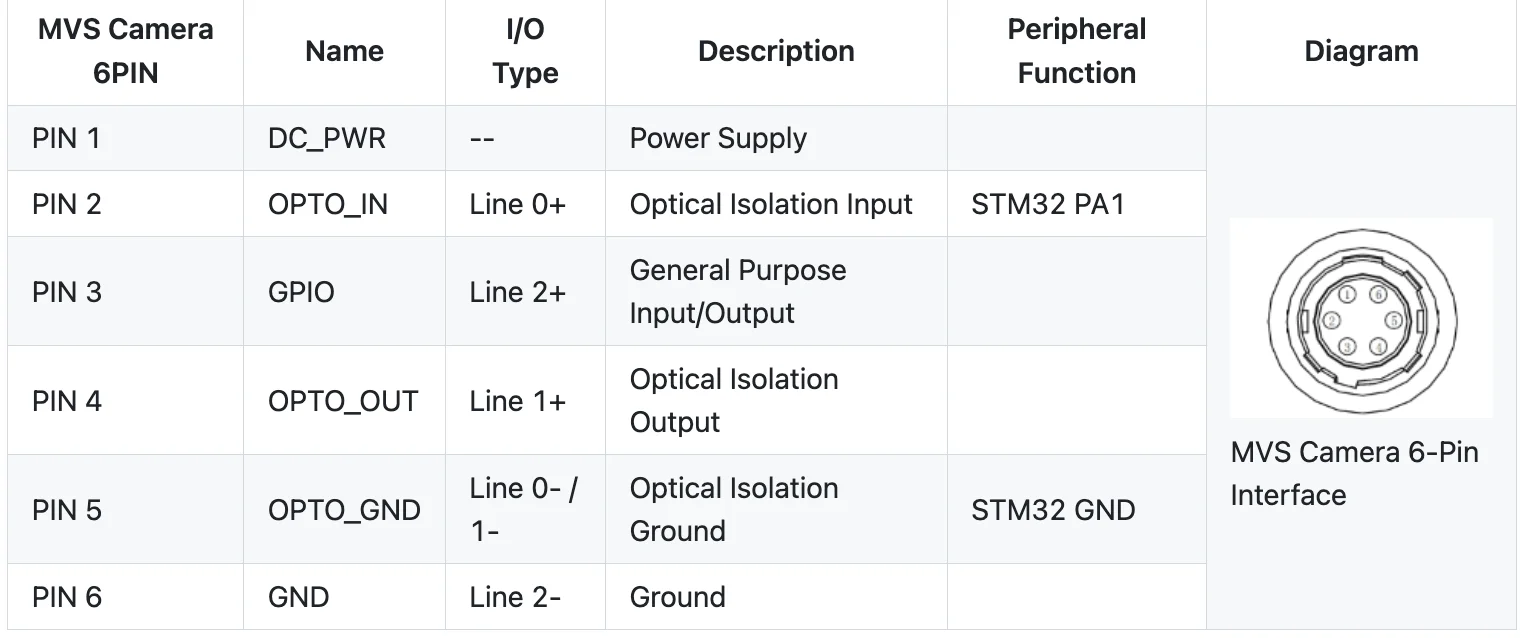
line configure
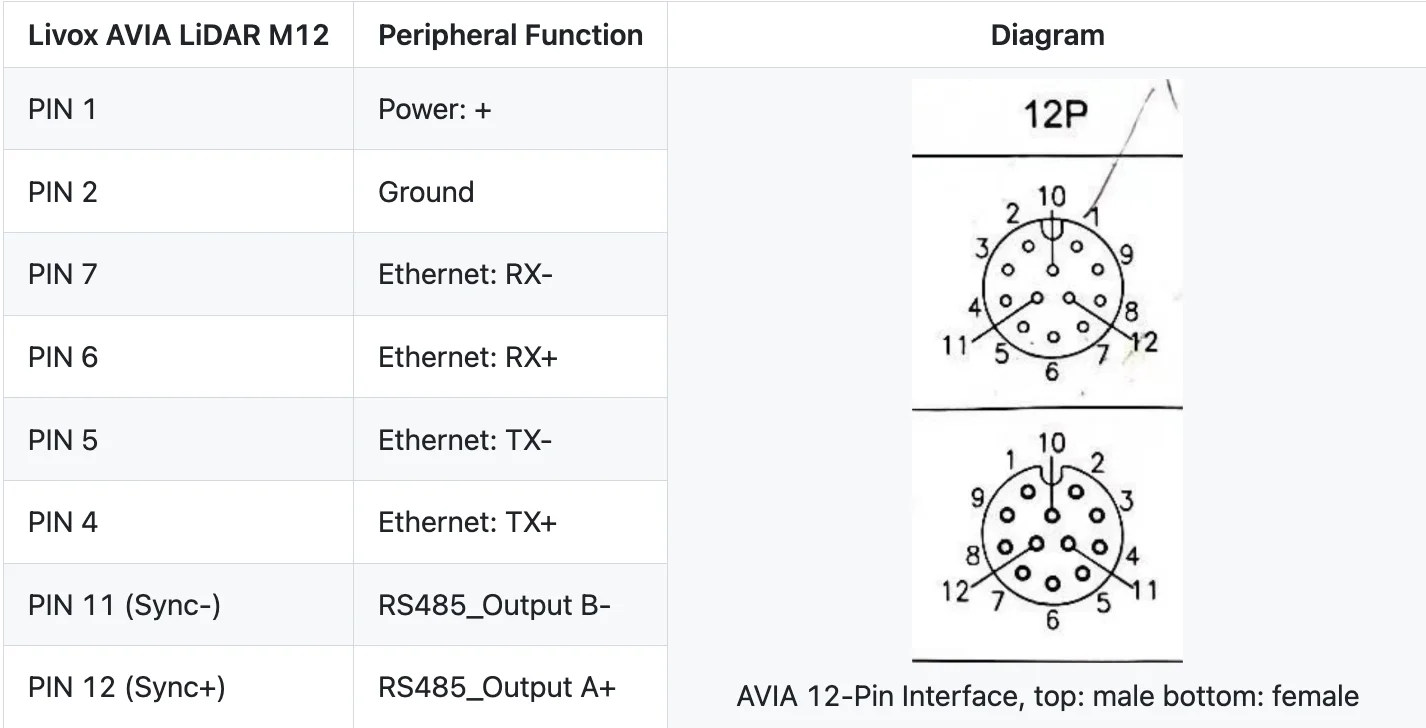
lidar
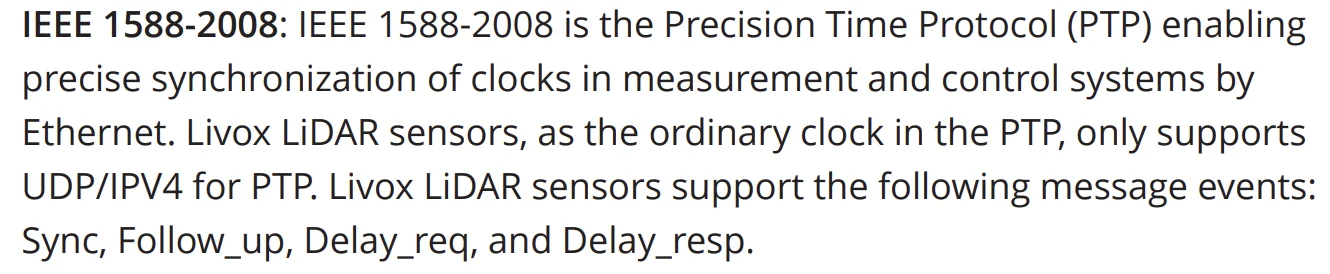
mid360s 는 PTP 기술을 지원한다. Master와 slave의 시계를 같은 timeline으로 맞추는 기술이라고 생각하면 될 것 같다. RJ45 케이블이 연결되어있으면 하드웨어에 있는 시계가 PTP 패킷이 오가는 순간에 timestamp를 찍어 매우 강건하게 시간 동기화를 할 수 있다. (orin nano는 지원을 안하기 때문에 software PTP로 진행하다. 소프트웨어적 오차가 반영된다.)
- 따라서 mid360s에서 나오는 timestamp는 호스트 clock과 어느정도 시간이 맞는다고 볼 수 있다.
- 8번 pin에 PPS신호를 쏴주어 매 초의 경계를 라이다에게 알려주어 시간축이 틀어지는 현상을 방지한다.
- 카메라도 PTP를 지원하는 기종이 있지만 내 카메라는 지원하지 않기 떄문에 external hardware trigger를 통해 10hz의 pwm신호를 쏴주어 맞추게 된다. 이때 jetson orin으로 interupt가 발생했을때의 시간을 패킷으로 보내어 현재 ros time과 아두이노 time의 차이를 어느정도 유추할 수 있다.
Arduino
code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
// Arduino GIGA R1
// USB-C Serial: Jetson/Mini PC와 통신
// D2: Camera trigger
// D3: Optional LiDAR PPS 1Hz
const int CAM_TRIG_PIN = 2;
const int LIDAR_PPS_PIN = 3;
bool running = false;
bool use_lidar_pps = false;
uint32_t cam_period_us = 100000; // 10 Hz
uint32_t last_cam_us = 0;
uint32_t last_pps_us = 0;
uint32_t cam_seq = 0;
uint32_t pps_seq = 0;
void pulsePin(int pin, uint32_t high_us) {
digitalWrite(pin, HIGH);
delayMicroseconds(high_us);
digitalWrite(pin, LOW);
}
void setup() {
pinMode(CAM_TRIG_PIN, OUTPUT);
pinMode(LIDAR_PPS_PIN, OUTPUT);
digitalWrite(CAM_TRIG_PIN, LOW);
digitalWrite(LIDAR_PPS_PIN, LOW);
Serial.begin(115200);
while (!Serial) {}
Serial.println("GIGA_TRIGGER_READY");
}
void handleCommand(String cmd) {
cmd.trim();
if (cmd == "START") {
running = true;
Serial.println("OK START");
} else if (cmd == "STOP") {
running = false;
Serial.println("OK STOP");
} else if (cmd.startsWith("FPS ")) {
float fps = cmd.substring(4).toFloat();
if (fps > 0.1 && fps <= 60.0) {
cam_period_us = (uint32_t)(1000000.0 / fps);
Serial.print("OK FPS ");
Serial.println(fps);
}
} else if (cmd == "PPS_ON") {
use_lidar_pps = true;
Serial.println("OK PPS_ON");
} else if (cmd == "PPS_OFF") {
use_lidar_pps = false;
Serial.println("OK PPS_OFF");
}
}
void loop() {
if (Serial.available()) {
String cmd = Serial.readStringUntil('\n');
handleCommand(cmd);
}
if (!running) return;
uint32_t now = micros();
// Camera trigger: 10~15Hz 등 원하는 fps
if ((uint32_t)(now - last_cam_us) >= cam_period_us) {
last_cam_us = now;
// 이 줄을 Jetson이 읽고 host time으로 timestamp를 찍음
Serial.print("CAM,");
Serial.print(cam_seq++);
Serial.print(",");
Serial.println(now);
pulsePin(CAM_TRIG_PIN, 100); // 100 us pulse
}
// LiDAR PPS: 선택사항. 쓸 거면 반드시 1Hz
if (use_lidar_pps && (uint32_t)(now - last_pps_us) >= 1000000UL) {
last_pps_us = now;
Serial.print("PPS,");
Serial.print(pps_seq++);
Serial.print(",");
Serial.println(now);
pulsePin(LIDAR_PPS_PIN, 100); // PPS high > 1us 조건 만족
}
}
- 아두이노의 GND와 라이다, 카메라의 GND를 묶음어야지만 트리거 신호가 잘 전달된다.
Tips
- 아래와 같이 livox의 custom message를 통해 라이다 토픽의 timestamp가 결국 첫번째 포인트의 ros 시간대에 불과하고 이후에 각 포인트마다 몇 초의 시간 offset이 흘렀는지를 확인할 수 있게 된다. 이는 매우 중요한데 livox lidar는 imu또한 캘리브레이션 되어있기때문에 imu topic의 값을 통해 lidar point의 각 offset 마다의 움직임을 보간하여 한 시점에서의 descew된 pointcloud로 복원할 수 있게 된다. 이러한 포인트를 특정한 시점의 이미지에 투영하면 되기 때문에 카메라와 Lidar HZ를 맞추는 것은 매우 중요하다.
- 또한 라이다 토픽의 주기를 10hz로 하였을때 한 Topic이 담고있는 포인트들의 Offset을 전부 더하면 100ms가 된다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
jetson@loe:~$ ros2 topic echo /livox/lidar --once
header:
stamp:
sec: 1777892189
nanosec: 400149246
frame_id: livox_frame
timebase: 1777892189400149246
point_num: 20064
lidar_id: 192
rsvd:
- 0
- 0
- 0
points:
- offset_time: 0
x: -2.1410000324249268
y: -1.5369999408721924
z: 2.4860000610351562
reflectivity: 88
tag: 0
line: 0
- offset_time: 4947
x: -2.0759999752044678
y: -1.399999976158142
z: 2.5390000343322754
reflectivity: 77
tag: 0
line: 1
- offset_time: 9894
x: -2.006999969482422
y: -1.2589999437332153
z: 2.5799999237060547
...
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.