[Unist 복원 프로젝트] Part 9. dense lidar dataset
[Unist 복원 프로젝트] Part 9. dense lidar dataset
현재 상황
- 현재 상황은 lidar slam (fast-livo2)가 겉보이게는 정확해 보이지만 pose를 colmap의 pose와 비교해볼때 distance에는 2~6cm의, rotation에서는 2~3 도의 평균적인 오차가 있는 것을 확인하였다. 이러한 얼핏 보기에는 작아보이는 오차만으로도 3DGS 결과물에는 차이가 많이 발생하는 것을 확인하였다.
- colmap 결과물 PSNR : 약 28 db
- online slam 결과물의 PSNR : 약 21 db
- 이러한 문제의 원인에는 첫번째로 lidar - camera extrinsic calibration에서 문제가 있거나 fast-livo2의 slam결과물에서 이상이 있는 것으로 짐작할 수 있다.
- livox mid360 lidar는 128채널 같은 라이다에 비해서 이동하면서 online slam할 경우에 생기는 lidar point가 mesh를 만들기에 dense하지 못하다. 따라서 삼각대에 고정해놓고 라이다 토픽을 특정 시간동안 중첩시켜서 dense한 라이다 포인트를 얻을 수 있도록 하려고 한다.
- 이후에 취득한 dense PCD들을 icp와 같은 매칭기법을 통해서 병합하고 작은 scene의 dens lidar point map을 취득 할 수 있다.
dataset 취득


- 새로운 rig는 카메라의 1/4 inch hall과 딱 맞아 떨어진다. 데이터셋 취득 전략
- 한곳에서 120초 동안 pcd (약 2천3000만 포인트)를 중첩한다.
- 그곳에서의 이미지를 저장한다.
- 이름을 sequence로 저장하여 나중에 icp매칭에서 순차적으로 병합한다.
- 삼각대 방향과 위치를 옮긴후 1,2를 반복한다.
dataset
- pcd와 동시에 취득한 이미지가 중복되어있어서 1시간동안 촬영한 pcd file도 중복되어있지 않을까 두려웠지만,, 다행히 pcd data는 잘 취득된 것 같다.
- 1~2, 3~4, 5~6 번같이 2개씩 단위로 각도를 180도 회전해가면서 데이터를 수집하였다. 각 포인트가 0.5gb에 point개수도 같으니 ICP를 돌리는 것은 voxelize한 후에 진행하면 것 같다.
ICP strategy
먼저 순서대로 취득한 PCD point는 인접한 번호끼리 물리적으로 가까운 거리에 위치하기 때문에 먼저 이웃끼리 1~2, 3~4, 5~6과 같이 병합한 후에 병합한 결과물을 다시 이웃끼리 병합하는 식으로 진행하였다.
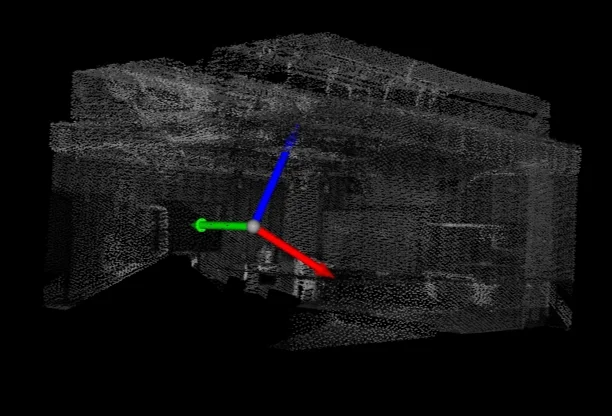
failure case
완전히 좌표계가 틀어져 버린 case 이다. 인접한 번호 사이에서 중복되는 feature가 별로 없을때에 이러한 현상이 나타날 수 있다.
잘 정합된 것처럼 보이지만 직사각형인 방의 특성상 서로 정반대에 있는 면에만 중복되는 feature가 있다면 (ex 계단, & TV) 그러한 feature를 기준으로 두 PCD의 관계가 180도 틀어져 버리는 경우가 있다. 자세히 보면 한쪽 면에만 존재하는 작은 칠판이 양쪽에 존재하는 것을 확인할 수 있다.

- lidar의 한계로 인해서 어쩔수 없이 ghosting point가 맺히는 현상이 있다.
- lidar 센서의 outlier로 실제로 존재하지 않는 먼거리에 점이 찍히는 것을 확인할 수 있다.
Result
먼저 인접한 포인트 번호끼리 merge한 후에 육안으로 보기에 포인트끼리 매끄럽게 합쳐진 결과물을 가지고 1 ~ 18번 pcd 까지의 융합 결과를 한번 생성하였다.
과정
- 원본 PCD 준비
- data_0001~0030.pcd
- 각 파일 약 2,400만 points
- ICP용 voxel 생성
- dense 원본을 바로 ICP하지 않고, 각 PCD를 5cm voxel로 downsample 하였다.
- 이후 outlier 방지를 위해 각 voxel cloud에서: abs(x)<=10, abs(y)<=10, abs(z)<=10 범위만 남김 (이 작업이 poincloud상의 원점에서 멀리 떨어진 이상한 outlier를 날려주어 포인트간의 merging quality를 높여주었다.)
- 초기 trusted anchor를 구성
- 시각 검수로 괜찮다고 판단한 조합들을 먼저 합침
- 최종적으로 0001~0018까지 accepted root 생성
- 이후 0019~0030은 하나씩 붙이는 방식으로 진행
- interactive sequential ICP
- 시작 root: 0001~0018
- 0019부터 0030까지 하나씩:
- 현재 accepted root에 새 PCD 하나를 ICP
- Open3D 창으로 확인
- 결과: accepted: 0001~0019, 0022~0030 rejected: 0020, 0021 (이 reject된 포인트들은 애초에 point가 방해물에 의해서 넓은 커버리지를 가지지 못하는 경향이 있었다.)
- pose tightening
- accepted된 각 PCD pose를 더 미세 조정
- 방식:
- 각 scan을 하나씩 잡고
- 그 scan을 제외한 나머지 accepted scan들로 global map 생성
- 해당 scan을 그 map에 point-to-plane ICP로 다시 정렬
- 0001은 anchor로 고정해서 전체 좌표계가 흔들리지 않게 함
- 2 iteration 수행
- 변화량은 대부분 mm 단위라 안정적으로 수렴
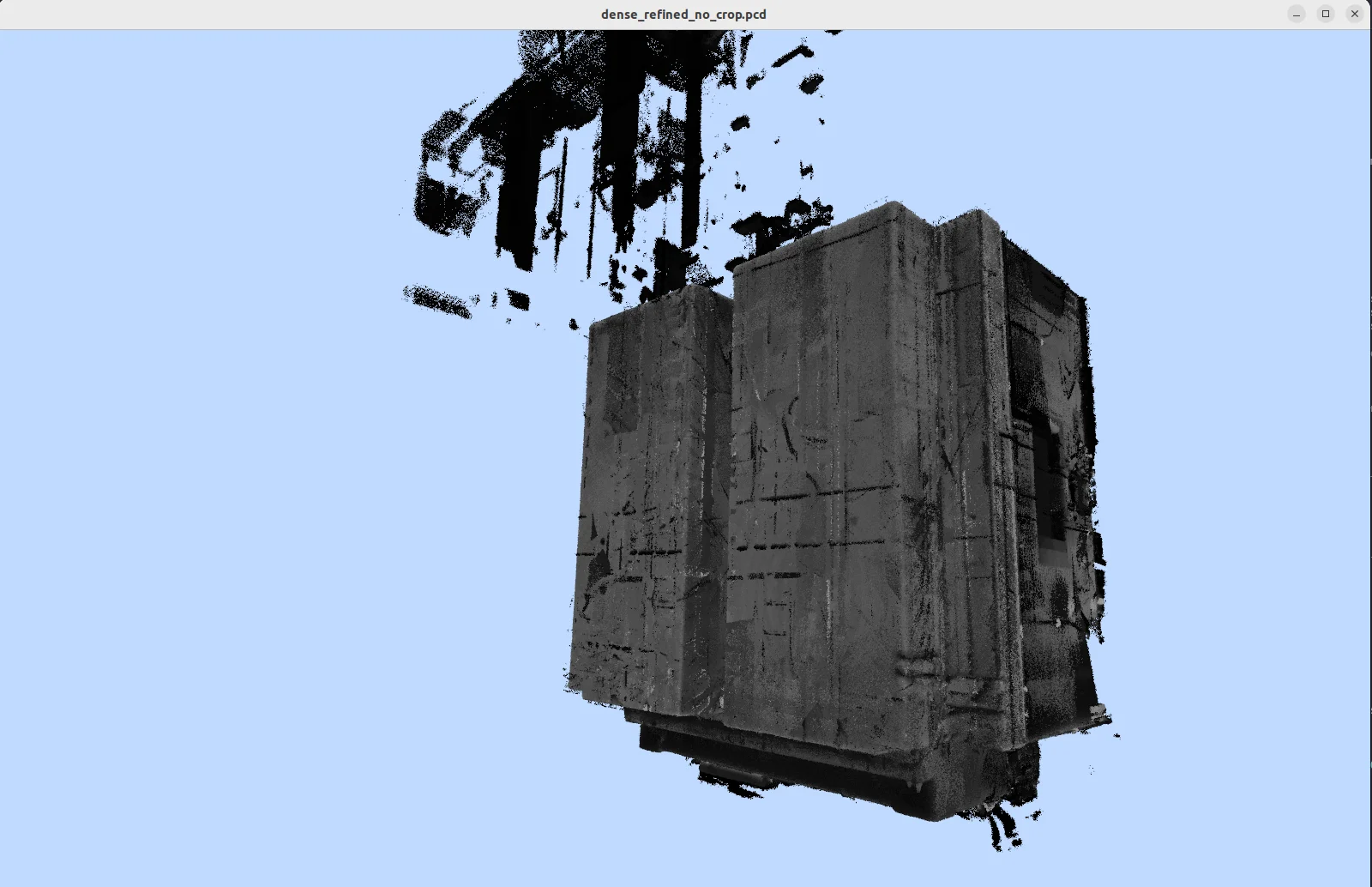
- 최종 dense 병합
- ICP는 cropped voxel cloud로 했지만,
- 최종 dense PCD는 crop하지 않음
- accepted raw PCD 전체 points에 refined pose를 적용해서 병합
- 최종: ICP/refined_abs10_poses/dense_refined_no_crop.pcd
- 포함: 0001~0019, 0022~0030
- 제외: 0020, 0021
- 총 points: 671,806,848 (6억 7000만개)
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.