[MVG] Lecture 2-1: Rigid body motion and 3D projective geometry
Three-Dimensional Euclidean Space
$\mathbb{E^3}$을 3차원 유클리드 공간을 나타내는 기호로 사용한다. 이때 $\mathbb{E^3}$에 속하는 모든 점 p는 아래와 같이 3개의cartesian coordinate를 가지는 $\mathbb{R^3}$의 한 점으로 표현될 수 있음. 따라서 $\mathbb{E^3}$과 $\mathbb{R^3}$ 사이에 일대일 대응이 존재함을 확인할 수 있다.
$\mathbf{X} \doteq \begin{bmatrix} X_1, X_2, X_3 \end{bmatrix}^{T} = \begin{bmatrix} X_1 \ X_2 \ X_3 \end{bmatrix} \in \mathbb{R}^3$
$\mathbb{E^3}$(Euclidean space)와 $\mathbb{R^3}$(cartesian coordinates) 사이에 일대일 대응이 존재
Vector
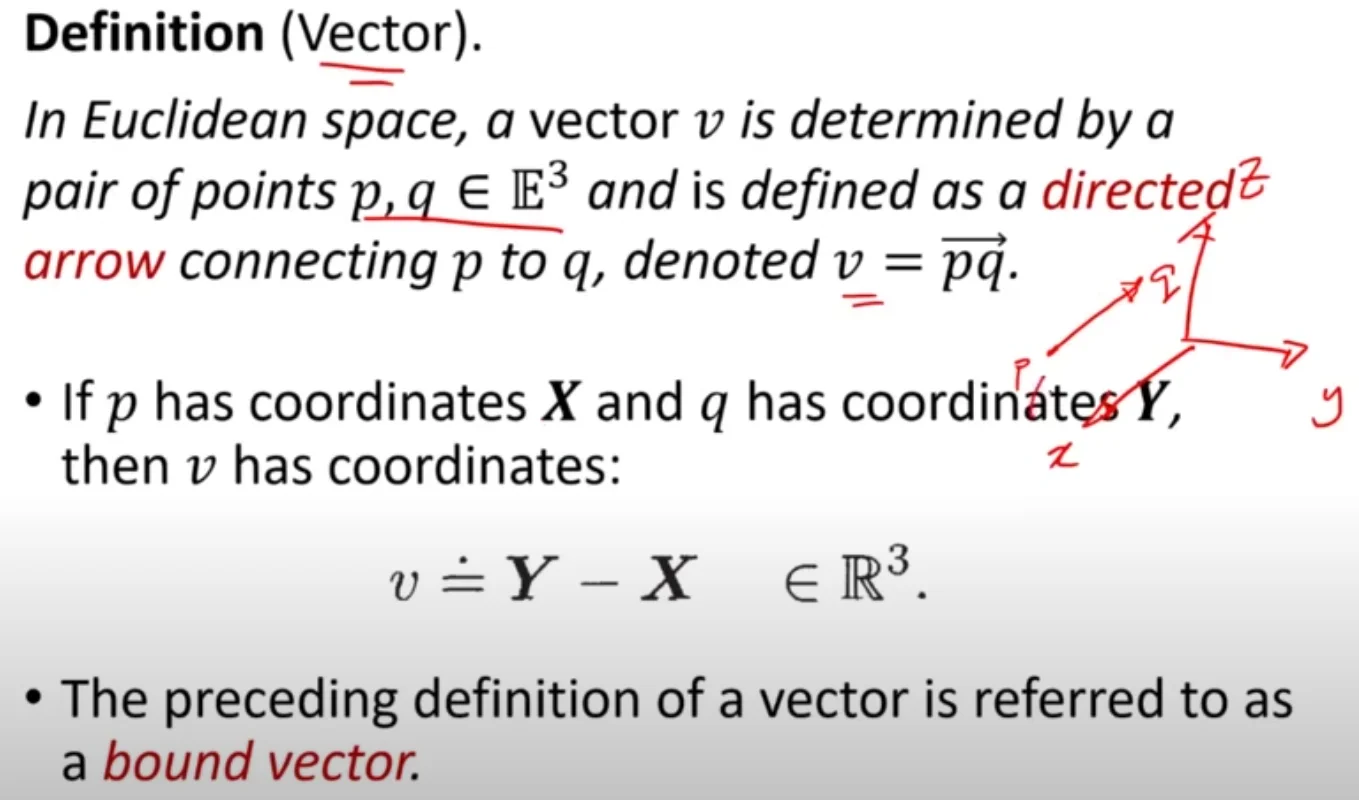
rigid body motion을 설명하기 위해 vector에 대한 설명 필요. vector $\mathbb{v}$는 두 점 $p,q \in \mathbb{E^3}$에 의해 $p$에서 $q$까지 연결하는 방향이 있는 화살표로 정의됨. 이때 $p$가 $X$에 대응되고, $q$가 $Y$에 대응되는 경우 $v$는 아래와 같이 쓸 수 있다. $v=Y-X \in \mathbb{R^3}$ 다음과 같이 base point, 위의 상황에서는 $p,q$에 해당되는 기준점에 의해 정의되는 벡터를 Bound Vector 라고 한다.
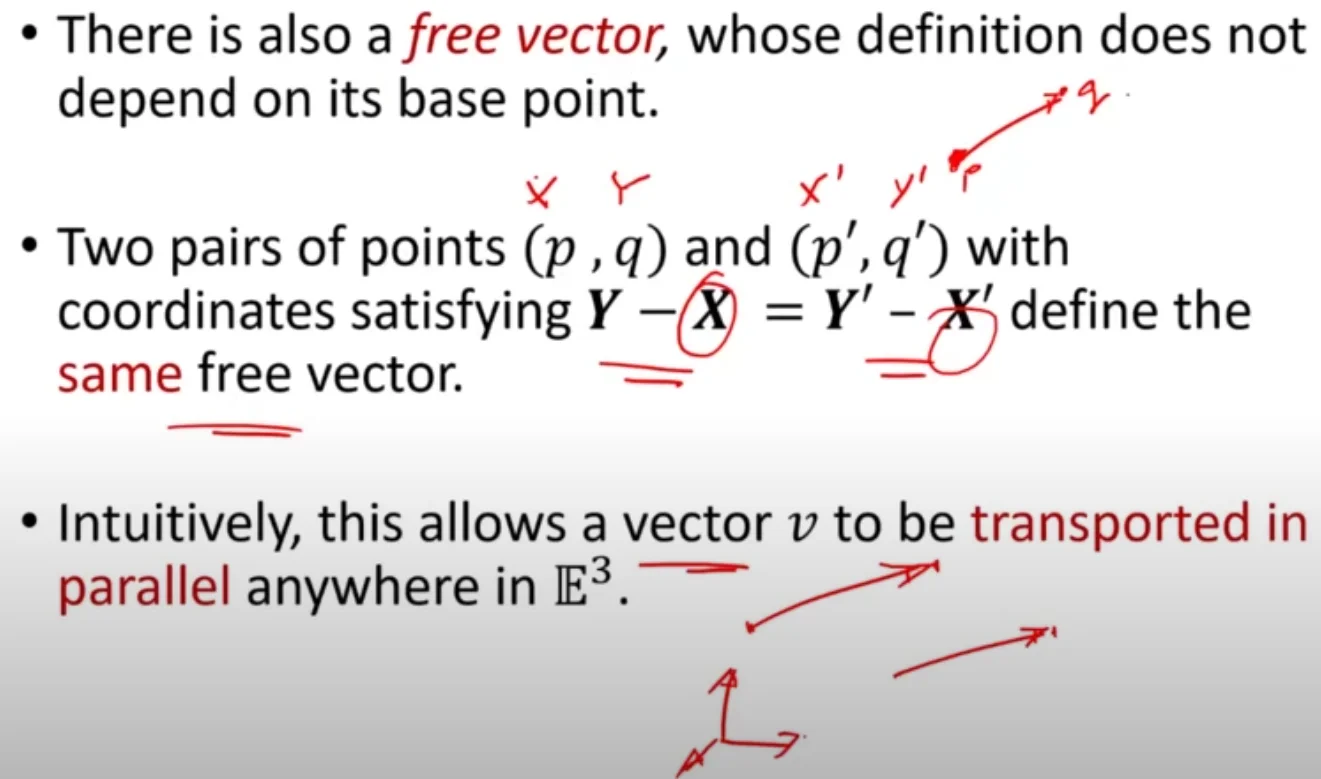
이와 다르게 base point에 의존하지 않는 벡터를 Free Vector 라고 하며, $Y-X = Y’-X’$을 만족하는 두개의 점 $(p,q)$와 $(p’,q’)$은 동일한 Free Vector를 정의한다.
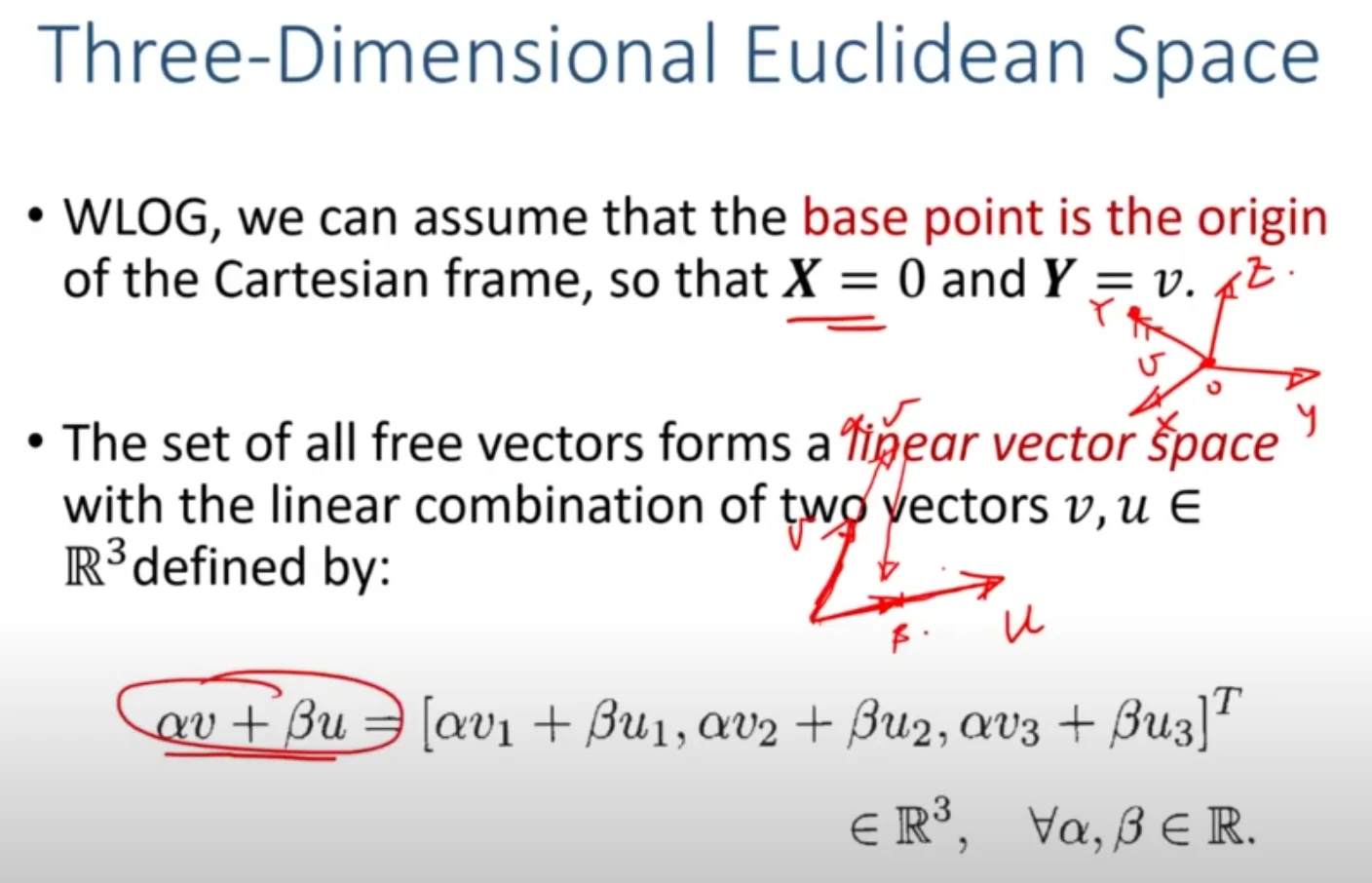
base point가 origin인 경우, $X$ = 0, $Y=v$이다. 모든 free vector의 집합은 linear vector space를 형성하고, 이는 두개의 벡터 $v,u\in \mathbb{E^3}$의 선형 결합으로 정의된다. 즉 $\mathbb{R^3}$의 모든 point는 linear combination으로 나타낼 수 있고, $\mathbb{E^3}$ 자체가 선형 벡터 공간임을 나타낸다. $\alpha v + \beta u = \begin{bmatrix} \alpha v_1 + \beta u_1, \alpha v_2 + \beta u_2, \alpha v_3 + \beta u_3 \end{bmatrix}^{T} \in \mathbb{R}^3, \quad \forall \alpha, \beta \in \mathbb{R}$
base point에 의해 정의되는 벡터는 Bound Vector라고 한다. base point에 의존하지 않고, $Y-X = Y’-X’$를 만족하는 벡터를 Free Vector라 한다. Free Vector는 평행이동 된 경우 동일하다. free vector의 집합인 linear vector space는 두 벡터의 선형 결합으로 정의된다.
Inner and Outer Products in $\mathbb{E^3}$
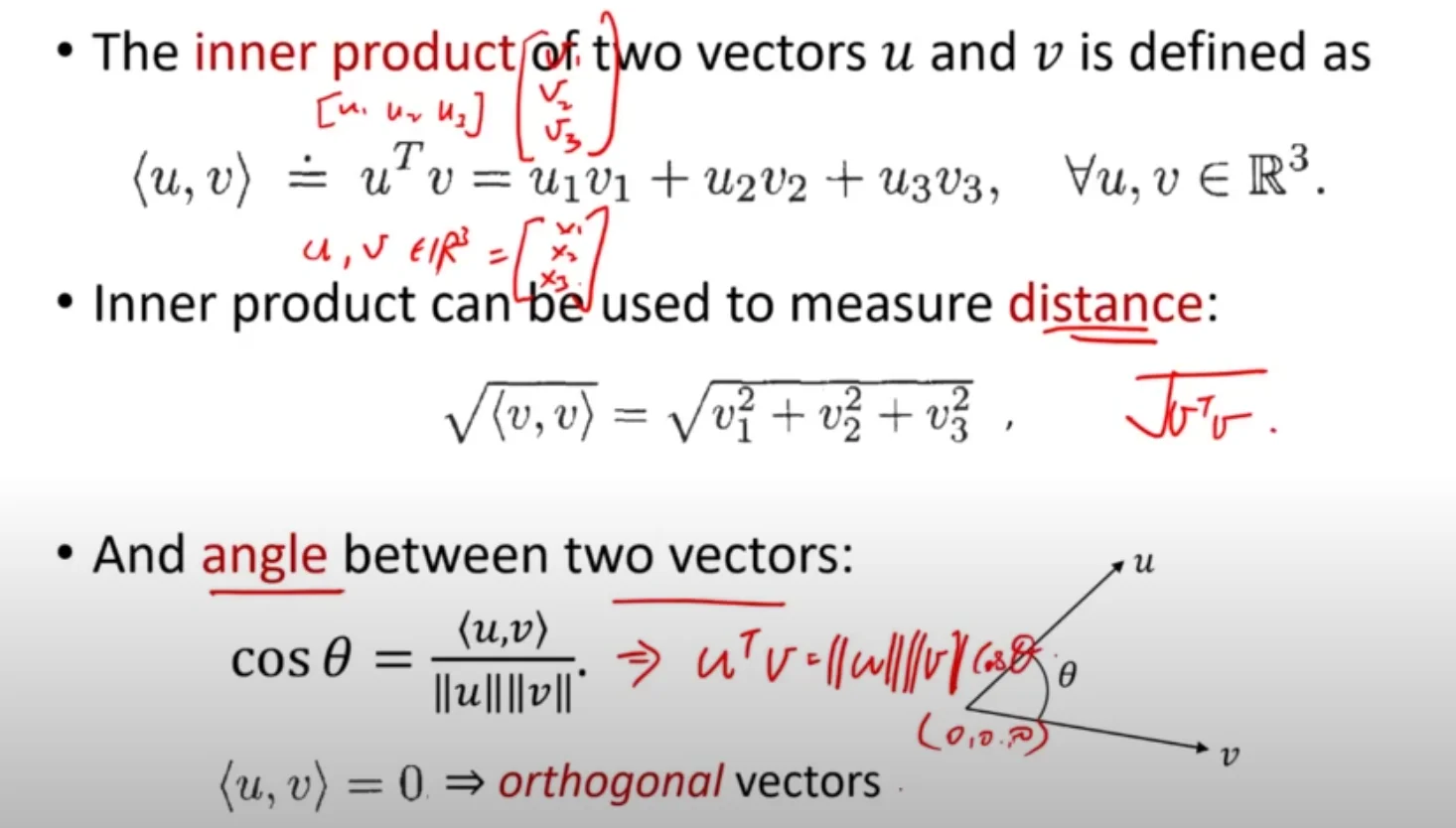
$u,v$의 내적은 아래와 같이 정의된다. $\langle u, v \rangle \doteq u^T v = u_1 v_1 + u_2 v_2 + u_3 v_3, \quad \forall u, v \in \mathbb{R}^3$ 이는 길이를 정의할때도 사용된다. 두 벡터 사이의 각도는 다음과 같이 정의된다. $\cos \theta = \frac{\langle u, v \rangle}{|u| |v|}$ $\langle u, v \rangle = 0 \Rightarrow \text{orthogonal vectors}$
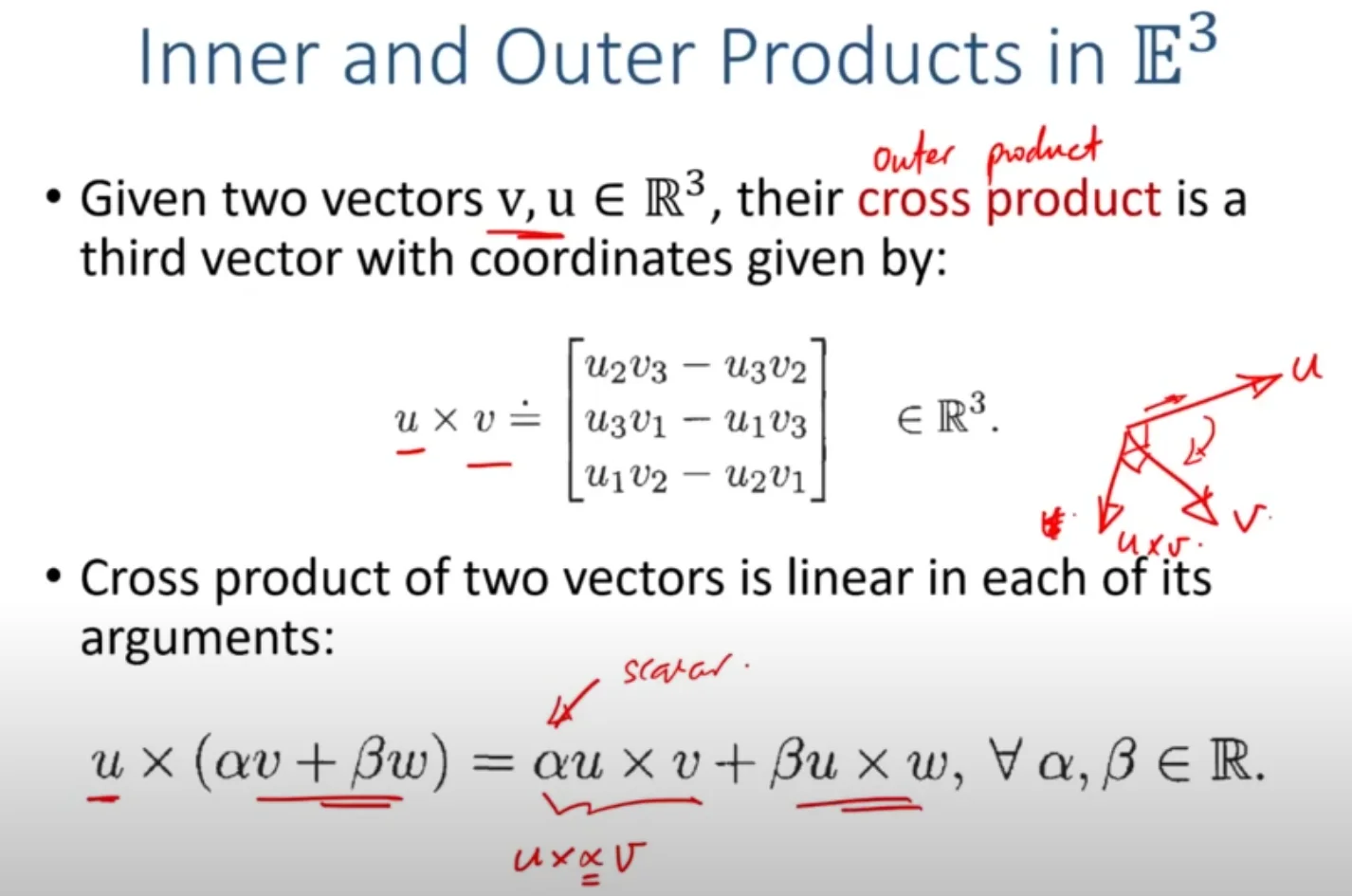
두 벡터의 외적은 새로운 벡터를 생성한다. 이때 방향은 오른손 법칙을 따르고, 새롭게 생성된 벡터는 두 벡터에 수직하다.
$u \times v \doteq \begin{bmatrix} u_2 v_3 - u_3 v_2 \ u_3 v_1 - u_1 v_3 \ u_1 v_2 - u_2 v_1 \end{bmatrix} \in \mathbb{R}^3$ 두 벡터의 linear combination을 외적한 것은 각각을 외적한 후 linear combination한 것과 동일하다.
$u \times (\alpha v + \beta w) = \alpha (u \times v) + \beta (u \times w), \quad \forall \alpha, \beta \in \mathbb{R}$
외적의 순서는 방향을 결정한다. 따라서 외적의 순서가 바뀌면 부호가 바뀐다. $u \times v = -v \times u$
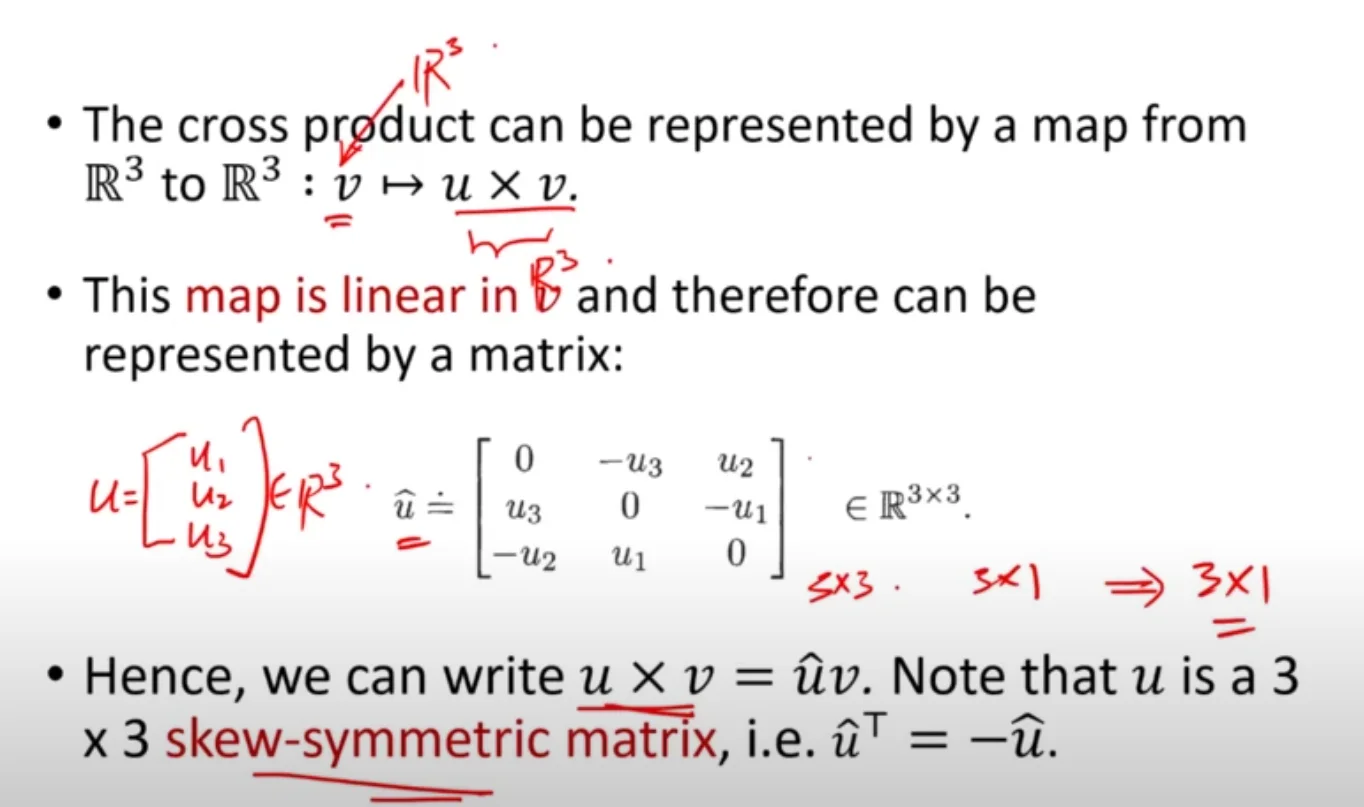
$u,v$의 외적은 $v$에서 $u\times v$로의 map으로 표현 가능하다. → $\mathbb{R^3}$ to $\mathbb{R^3}$ : $v \mapsto u \times v$ 반대 역시 가능하다. 이때 map을 skew-symmetric matrix라 하고, $\hat{u}$로 표현한다. 이때 $\hat{u}$는 $v$에 linear하다. $\hat{u} \doteq \begin{bmatrix} 0 & -u_3 & u_2 \ u_3 & 0 & -u_1 \
- u_2 & u_1 & 0 \end{bmatrix} \in \mathbb{R}^{3 \times 3},\ u \times v = \hat{u} v,\ \hat{u}^{T} = -\hat{u}$
Coordinate Frames
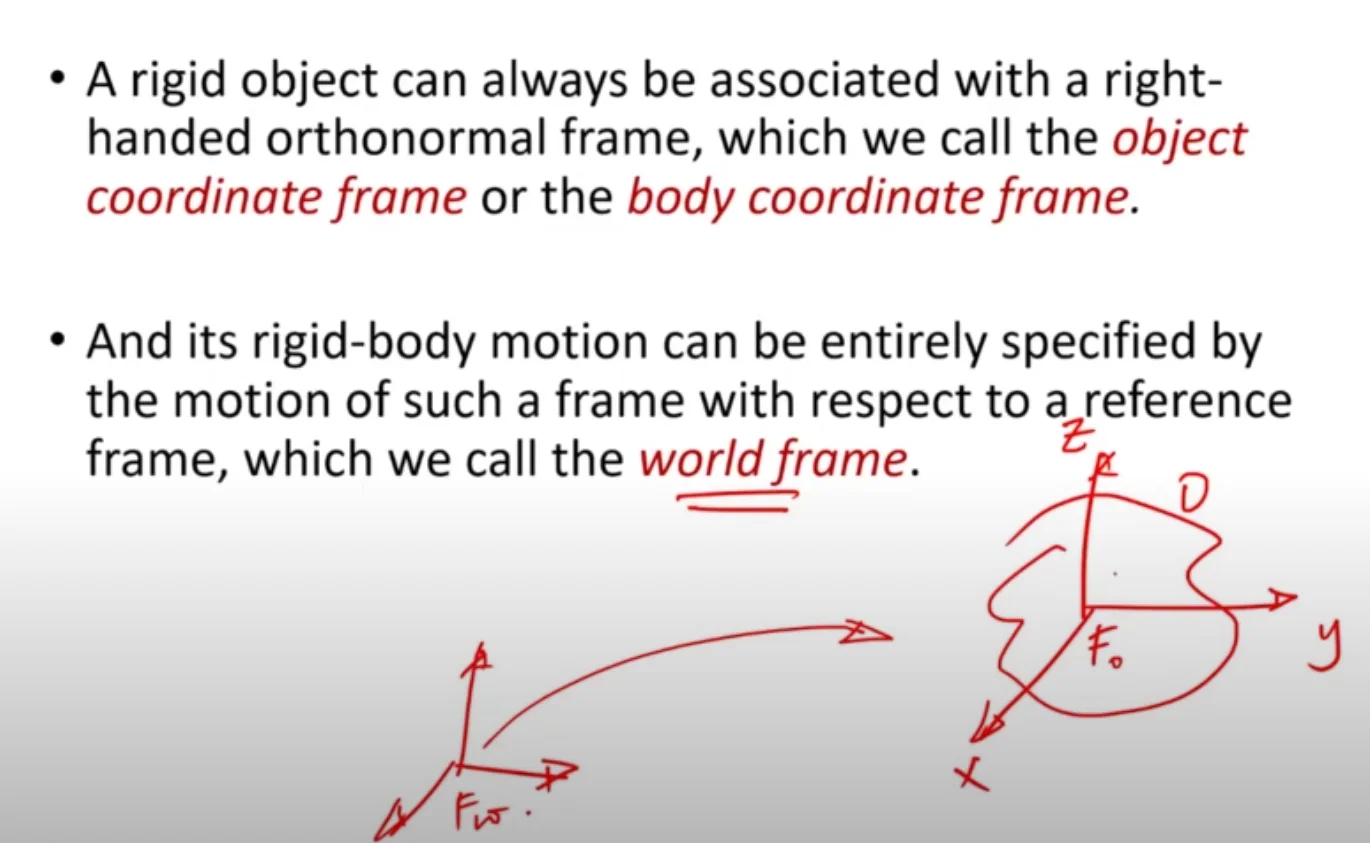
rigid object는 오른손 법칙을 만족하는 right-handed orthonormal frame을 가지며 이를 object coordinate frame 또는 body frame이라고 부른다. 또한, rigid-body motion은 reference frame과의 상대적인 motion으로 정의될 수 있으며, 이를 world frame이라 한다.
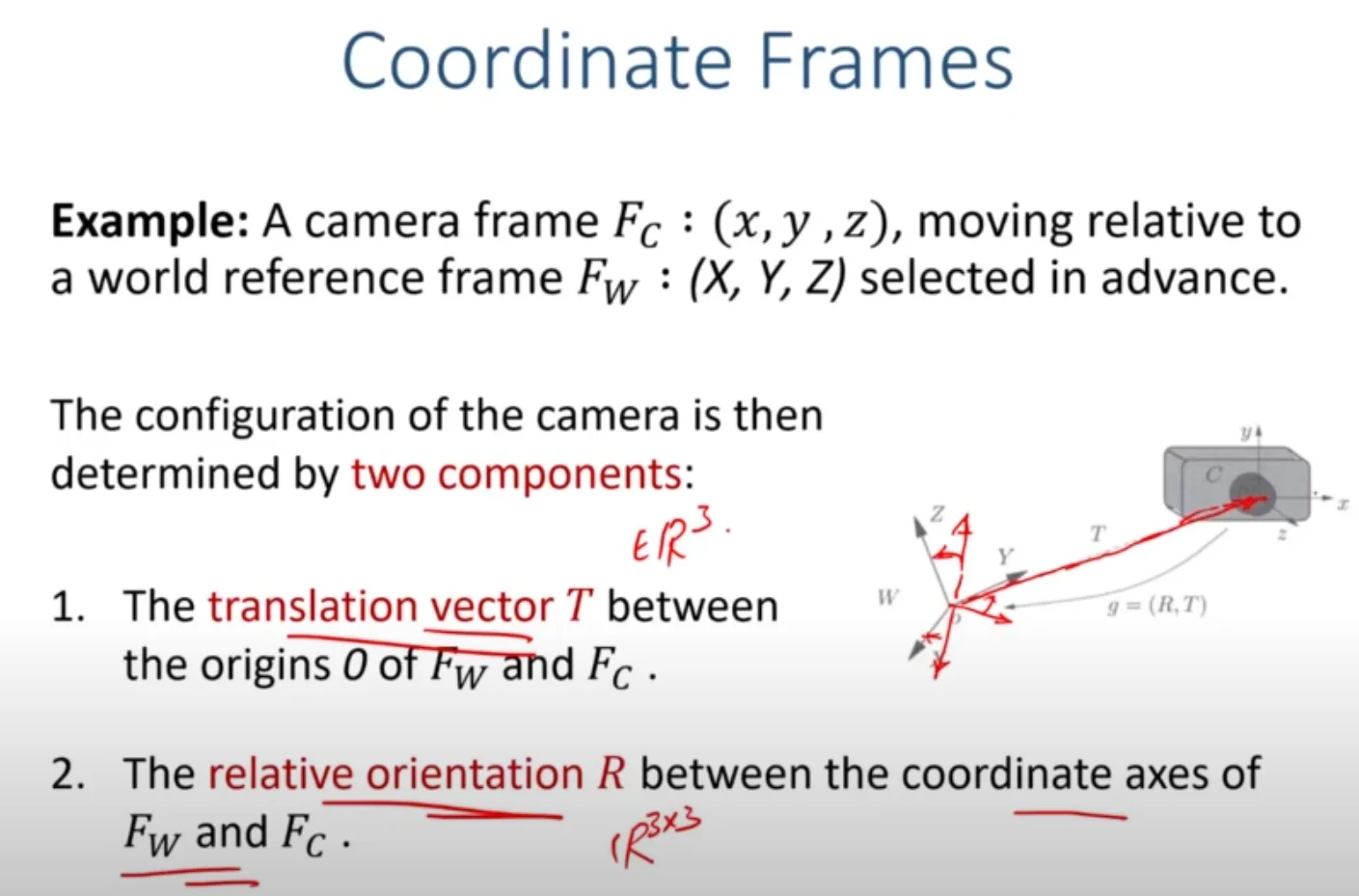
다음과 같이 body frame $F_C$와 world frame $F_W$가 있을 때 motion은 translation vector T와 Rotation vector R로 나타낼 수 있음.
Rigid-body Motion
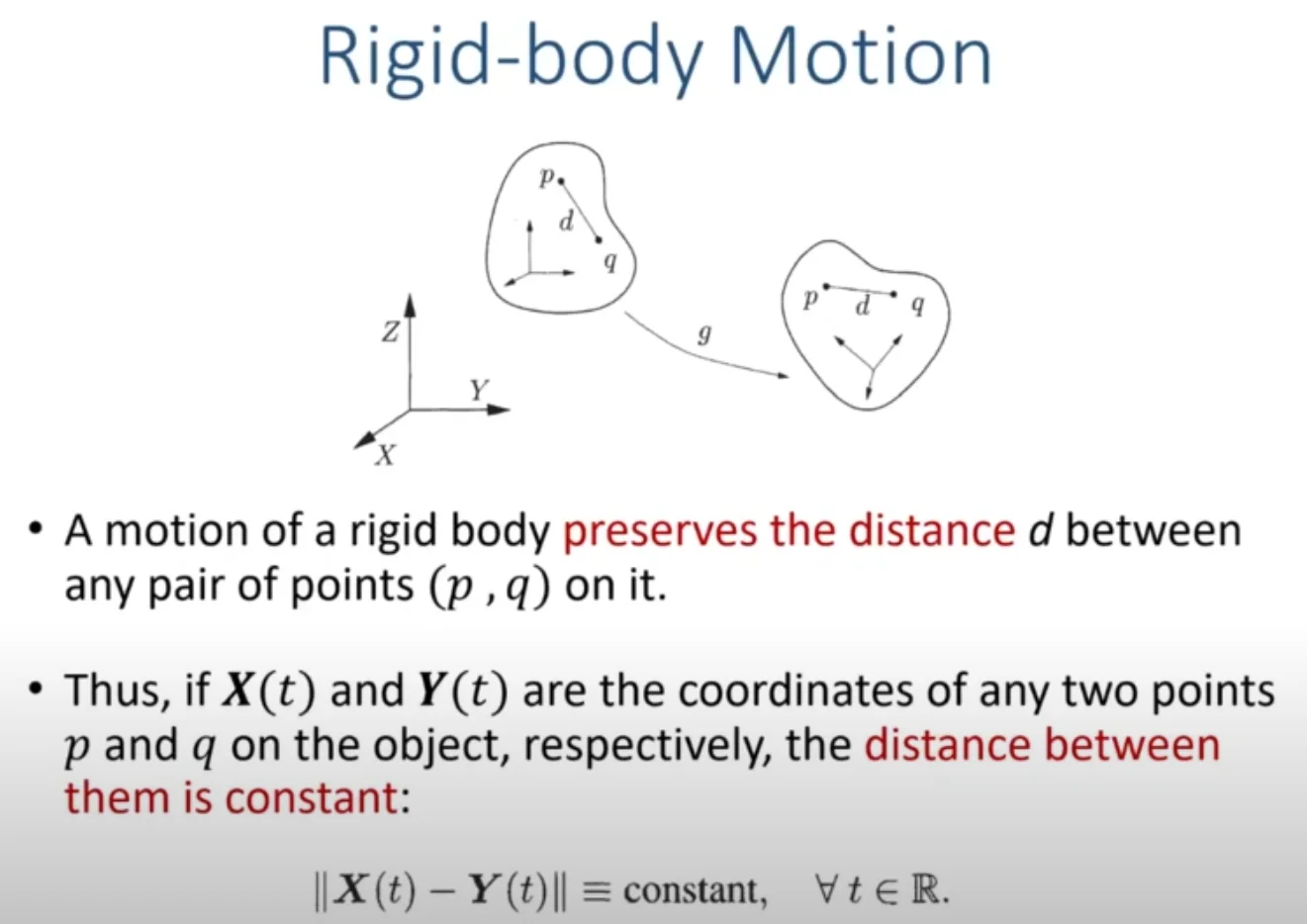
이때 rigid-body motion은 motion에 관계 없이 distance가 유지된다. $| \mathbf{X}(t) - \mathbf{Y}(t) | \equiv \text{constant}, \quad \forall t \in \mathbb{R}$
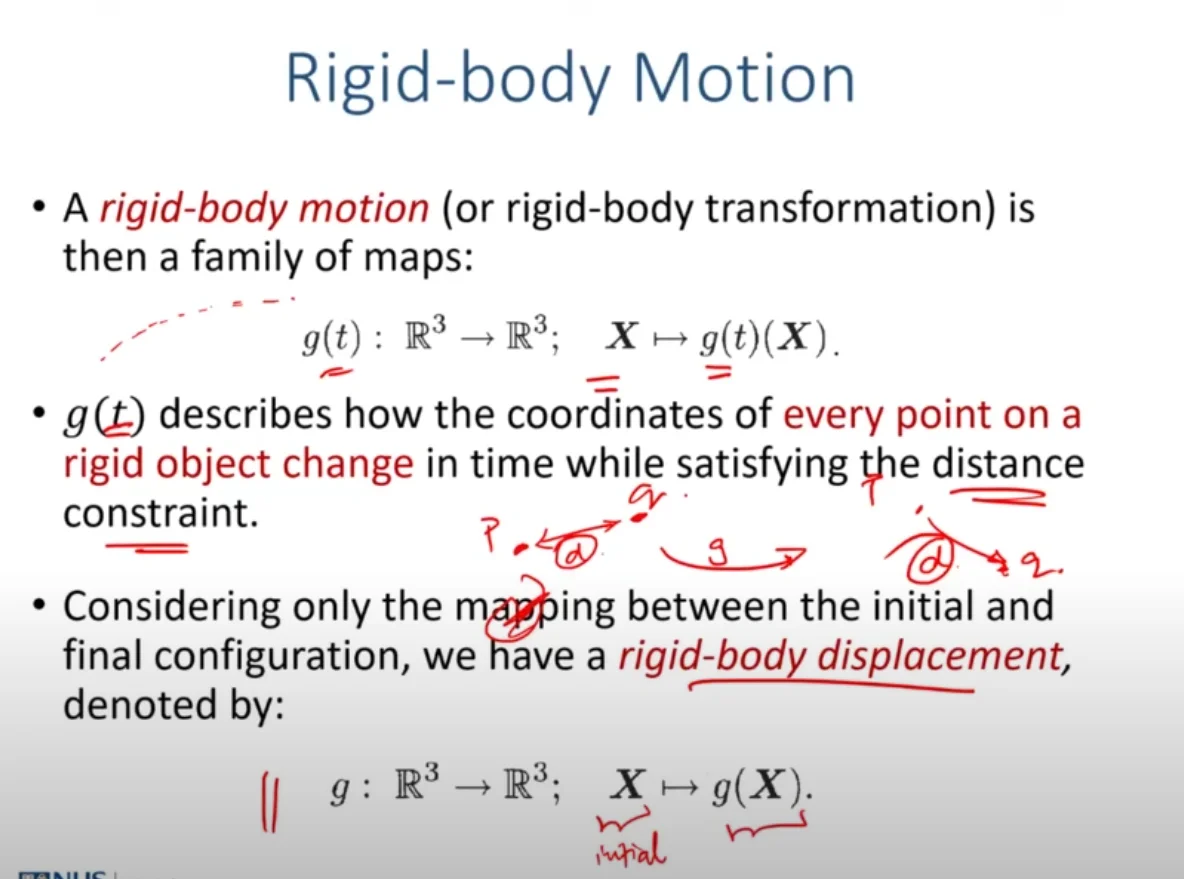
또한, rigid-body motion은 다음과 같은 family of maps, 즉 함수 집합으로 표현된다. $g(t) : \mathbb{R}^3 \to \mathbb{R}^3; \quad \mathbf{X} \mapsto g(t)(\mathbf{X})$ $g(t)$는 거리가 유지된다는 조건 하에 강체상의 모든 점의 좌표가 어떻게 변하는지를 나타낸다. 또한 시간을 생략해 다음과 같이 쓰기도 한다. $\mathbb{R}^3 \to \mathbb{R}^3; \quad \mathbf{X} \mapsto g(\mathbf{X})$ 벡터 역시 이를 만족한다. $v = \mathbf{Y} - \mathbf{X}$일때 g에 의해 아래와 같이 새로운 벡터를 얻을 수 있다. $u = g_(v) \doteq g(\mathbf{Y}) - g(\mathbf{X})$ rigid-body motion은 길이가 보존되기 때문에 $| g_(v) | = | v |, \quad \forall v \in \mathbb{R}^3$이다.
Euclidean Transformation
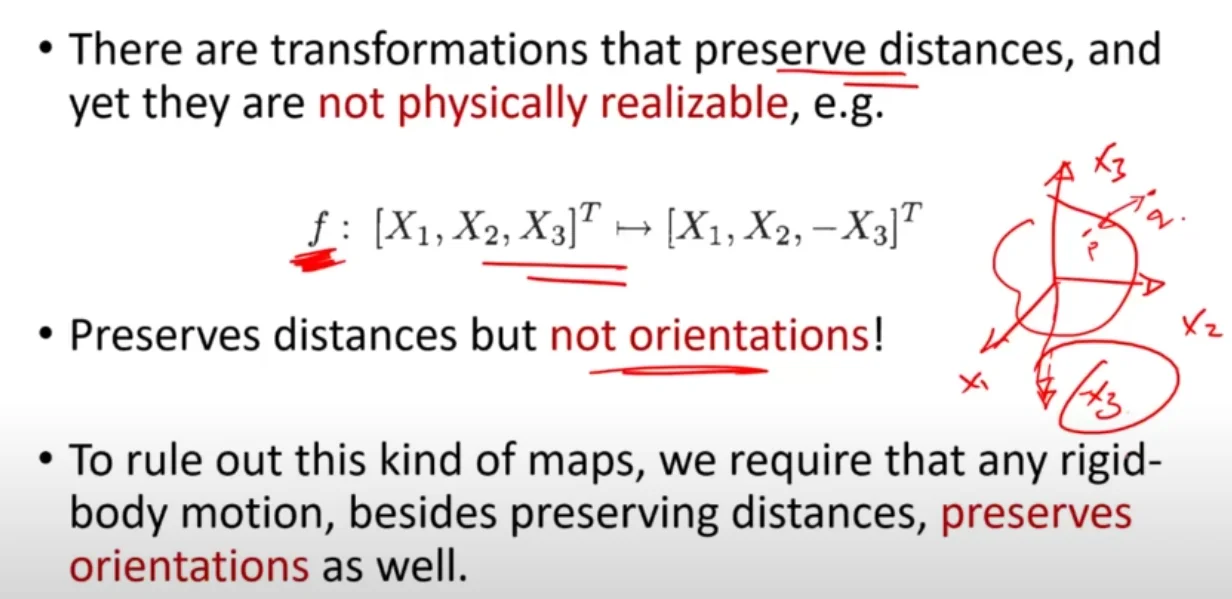
길이를 보존하는 map을 Euclidean Transformation이라 한다. 3차원 공간에서 이러한 Euclidean translation은 E(3)이라 나타낸다. 하지만, 이것이 rigid-body motion이라는 뜻은 아니다. $f : \begin{bmatrix} X_1, X_2, X_3 \end{bmatrix}^{T} \ \text{오른손 좌표계} \mapsto \begin{bmatrix} X_1, X_2, -X_3 \end{bmatrix}^{T} \ \text{왼손 좌표계}$와 같이 길이는 보존되지만 방향은 보존되지 않는 경우가 존재하기 때문에 rigid-body motion은 거리와 방향이 모두 보존되는 motion이다.
rigid-body motion
내적은 polarization identity로 나타낼 수 있다. $\langle u, v \rangle = \frac{1}{4} \left( | u + v |^2 - | u - v |^2 \right)$
$| u + v | = | g_(u) + g_(v) |$이기 때문에, 아래의 식이 성립한다. $\langle u, v \rangle = \langle g_(u), g_(v) \rangle, \quad \forall u, v \in \mathbb{R}^3$
증명
$\langle u, v \rangle = | u | | v | \cos \theta$
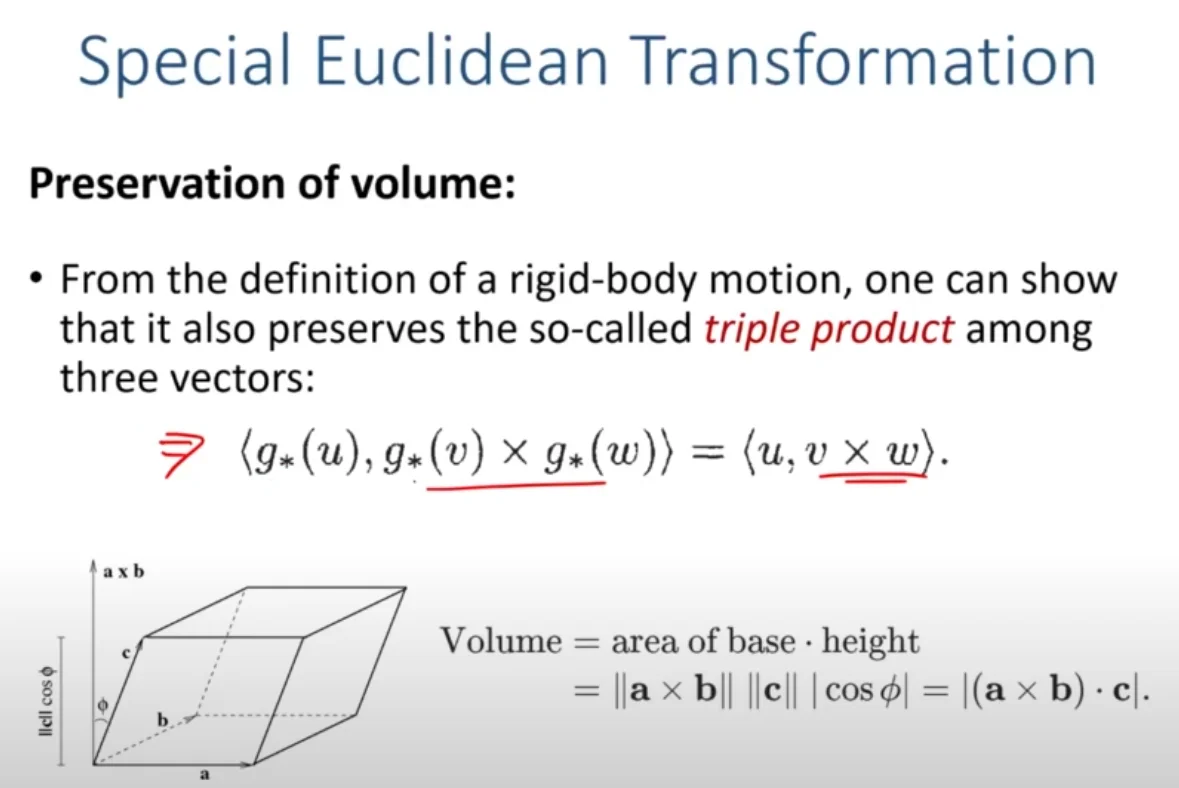
세 벡터 사이의 triple product 역시 보존된다. 이는 rigid-body의 부피 역시 보존됨을 의미한다. $\langle g_(u), g_(v) \times g_*(w) \rangle = \langle u, v \times w \rangle$ $\text{Volume} = \text{area of base} \times \text{height}
| = | a \times b | | c | | \cos \phi |
| = | (a \times b) \cdot c | .$ |
Orthogonal Matrix Representation of Rotation
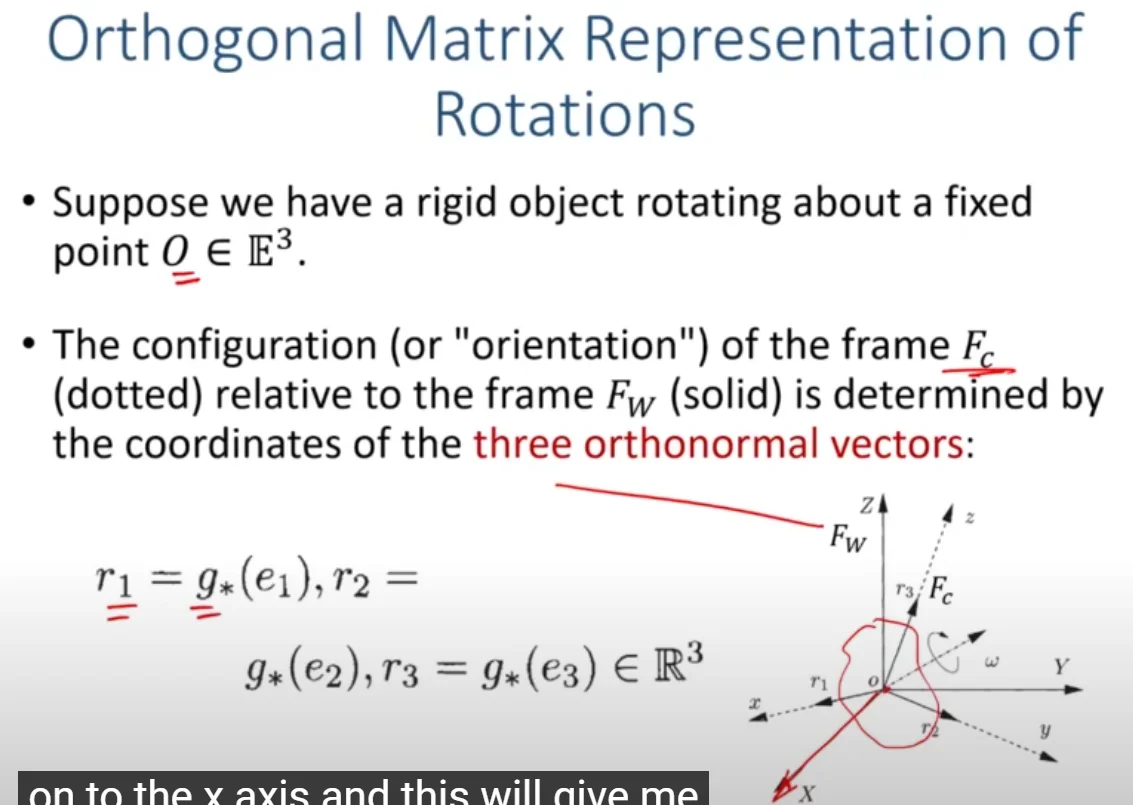
원점을 중심으로 회전하는 강체를 가정하였을 경우, $F_C$와 $F_W$의 관계는 세개의 orthonormal vectors의 좌표로 결정된다. 이는 다음과 같다. $r_1 = g_(e_1), \quad r_2 = g_(e_2), \quad r_3 = g_*(e_3) \in \mathbb{R}^3$ 이때 $r_1, r_2, r_3$은 body frame의 unit vector이며, 강체의 회전은 $3\times3$ matrix로 결정된다. $R_{wc} \doteq [r_1, r_2, r_3] \quad p \in \mathbb{R}^{3 \times 3}$ 이때 $R_{wc}$의 column vector들이 각각 $r_1,r_2,r_3$이다. 따라서 Orthogonal matrix이며, 아래와 같은 조건을 만족한다. $r_i^T r_j = \delta_{ij} \doteq \begin{cases} 1, & \text{for } i = j,
0, & \text{for } i \neq j \end{cases}, \quad \forall i,j \in {1,2,3} \R_{wc}^T R_{wc} = R_{wc} R_{wc}^T = I \ R_{wc}^{-1} = R_{wc}^{T} \ \det(R_{wc}) = +1 \ by\ right-handed\ frame$
이때 $R_{wc}$는 special Orthogonal matrix라고 하며 이는 방향을 유지한다는 뜻을 포함하고 있다. 위와 같은 특징들로 인해 모든 특수 직교 행렬은 다음과 같이 표기된다. $SO(3) \doteq { R \in \mathbb{R}^{3 \times 3} \mid R^T R = I, \det(R) = +1 }$ 또한, 이는 회전 행렬이라 불린다.
Euler Angles to Rotation Matrix
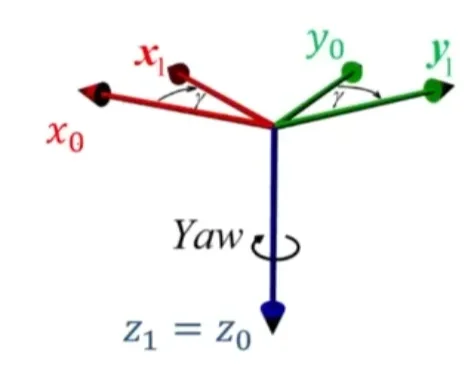
yaw angle은 z축을 기준으로 회전시킨것
$R_z(\gamma) = \begin{bmatrix} \cos(\gamma) & -\sin(\gamma) & 0
\sin(\gamma) & \cos(\gamma) & 0
0 & 0 & 1 \end{bmatrix}$
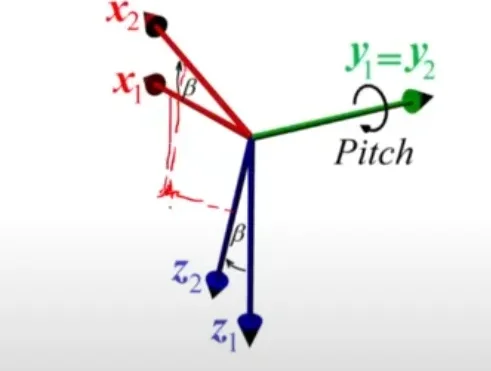
pitch angle은 y축을 기준으로 회전시킨것
$R_y(\beta) = \begin{bmatrix} \cos(\beta) & 0 & \sin(\beta)
0 & 1 & 0
-\sin(\beta) & 0 & \cos(\beta) \end{bmatrix}$
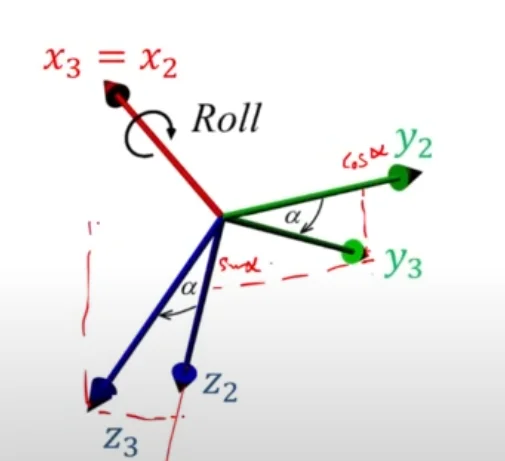
roll angle은 x축을 기준으로 회전시킨것
$R_x(\alpha) = \begin{bmatrix} 1 & 0 & 0
0 & \cos(\alpha) & -\sin(\alpha)
0 & \sin(\alpha) & \cos(\alpha) \end{bmatrix}$
Tait-Bryan angle
yaw-pitch-roll 순으로 회전시킨 것으로, 최종적으로는 아래와 같다.
$R_3^0 = R_z(\gamma) R_y(\beta) R_x(\alpha)= \begin{bmatrix} \cos\gamma & -\sin\gamma & 0
\sin\gamma & \cos\gamma & 0
0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} \cos\beta & 0 & \sin\beta
0 & 1 & 0
-\sin\beta & 0 & \cos\beta \end{bmatrix} \times \begin{bmatrix} 1 & 0 & 0
0 & \cos\alpha & -\sin\alpha
0 & \sin\alpha & \cos\alpha \end{bmatrix}$
Rigid-body motion and its Representations
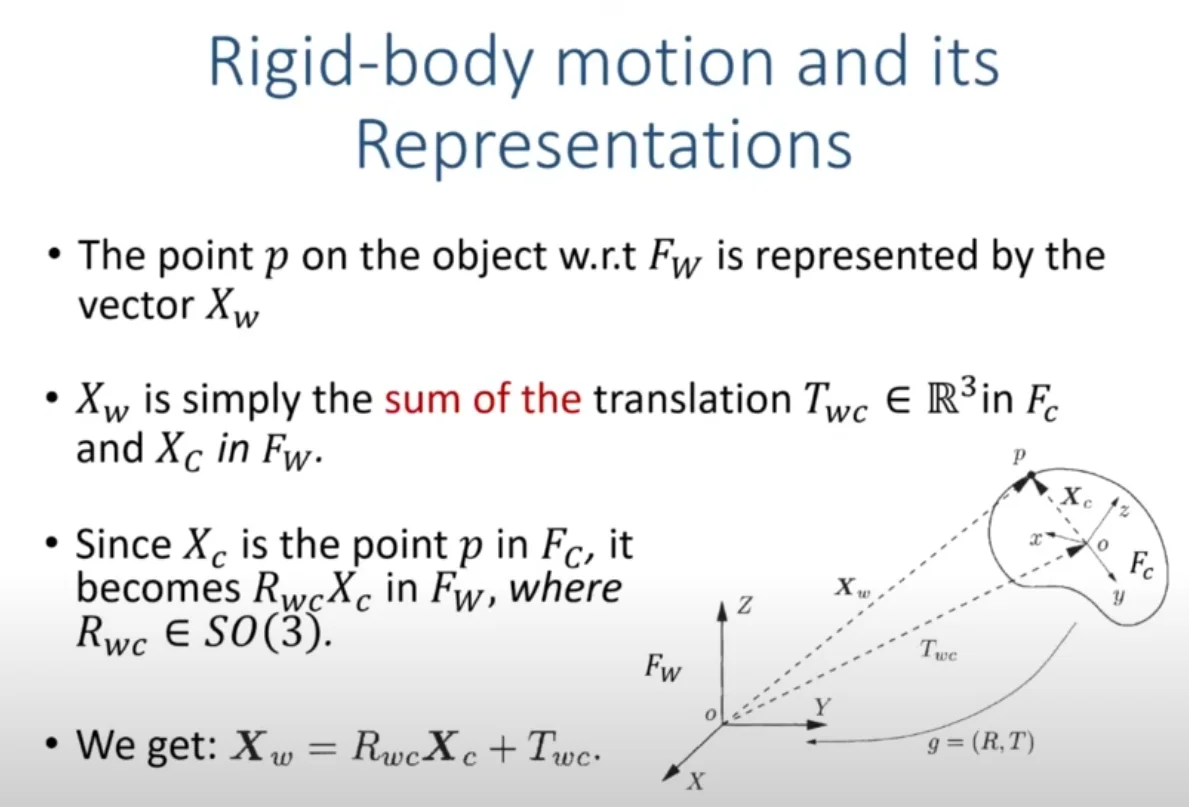
world frame에서 rigid-body 위의 한 점 p를 $X_W$라 하자. 이때 $X_W$는 $T_{WC}$와 $X_C$의 합으로 표현되며, 다음과 같다. $X_W=T_{WC}+X_C$ 이때, $T_{WC}$는 $F_C$에 속하고, $X_C$는 $F_W$에 속한다. $X_C$는 $F_C$ 위의 점이기 때문에 $R_{WC} X_C$이다. 따라서 $X_W$는 다음과 같고, homogeneous coordiantes를 사용시 linear form으로 나타낼수 있다. $X_W = R_{WC} X_C + T_{WC}$ as linear form, $\bar{X}w = \begin{bmatrix} X_w \ 1 \end{bmatrix} = \begin{bmatrix} R{WC} & T_{WC} \ 0 & 1 \end{bmatrix}\begin{bmatrix} X_c \ 1 \end{bmatrix} \doteq g_{WC} \bar{X}_c$
$g = \begin{bmatrix} R & T \ 0 & 1 \end{bmatrix} \in \mathbb{R}^{4 \times 4}$
따라서 위의 rigid-body translation, 즉 Special Euclidean Transformation는 다음과 같다.
| $SE(3) \doteq \left{ g = \begin{bmatrix} R & T \ 0 & 1 \end{bmatrix} \ \Big | \ R \in SO(3), T \in \mathbb{R}^3 \right} \subset \mathbb{R}^{4 \times 4}$ |
여러 translation의 composition은 다음과 같이 이루어진다. 좌측에서 우측으로 이루어진다. $g_1 g_2 = \begin{bmatrix} R_1 & T_1 \ 0 & 1 \end{bmatrix} \begin{bmatrix} R_2 & T_2 \ 0 & 1 \end{bmatrix} = \begin{bmatrix} R_1 R_2 & R_1 T_2 + T_1 \ 0 & 1 \end{bmatrix} \in SE(3)$
또한, inverse는 다음과 같다.
$g^{-1} = \begin{bmatrix} R & T \ 0 & 1 \end{bmatrix}^{-1} = \begin{bmatrix} R^T & -R^T T \ 0 & 1 \end{bmatrix} \in SE(3)$
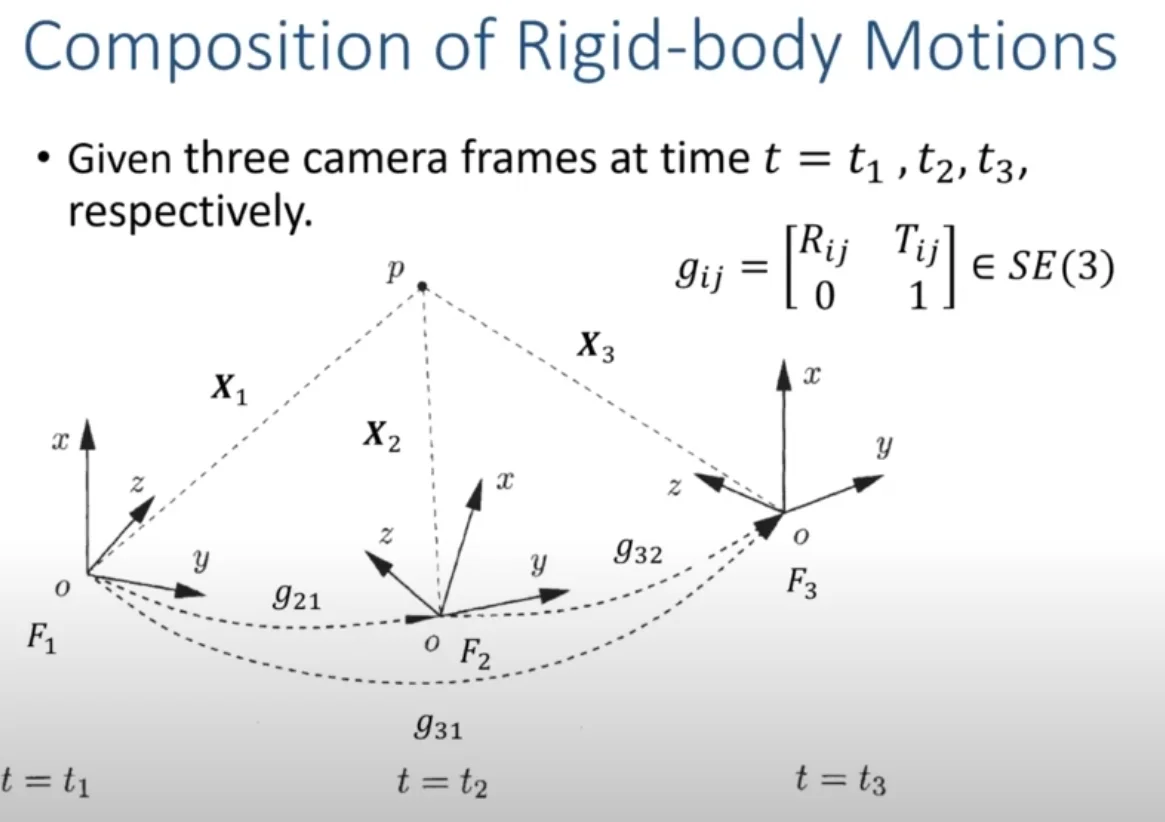
다음 그림에서 도출할 수 있듯,$X_2 = g_{21} X_1, \quad X_3 = g_{32} X_2, \quad X_3 = g_{31} X_1$를 만족한다. 이를 통해 다음과 같은 composition rule을 얻을 수 있다.
$g_{32} g_{21} = g_{31}$ 또한, 이를 통해 rule of inverse 역시 얻을 수 있다. $g_{21}^{-1} = g_{12}$ 이를 종합해보면 다음과 같은 composition rules를 얻을 수 있다.
$X_i = g_{ij} X_j, \quad g_{ik} = g_{ij} g_{jk}, \quad g_{ij}^{-1} = g_{ji}$