[Unist 복원 프로젝트] Part 2. slam을 사용해보자
[Unist 복원 프로젝트] Part 2. slam을 사용해보자
현재 상황
유니스트를 복원하기로 하였는데 실내 / 실외를 나누어서 복원하게 되었다. 실외는 전용 모바일로봇이 돌아다니며 전용 데이터셋을 얻을 수 있게 될 것 같고 실내에서는 일단 내가 지금 속해잇는 인공지능 대학원 106동 전체를 복원해보는 것으로 진행하기로 했다..
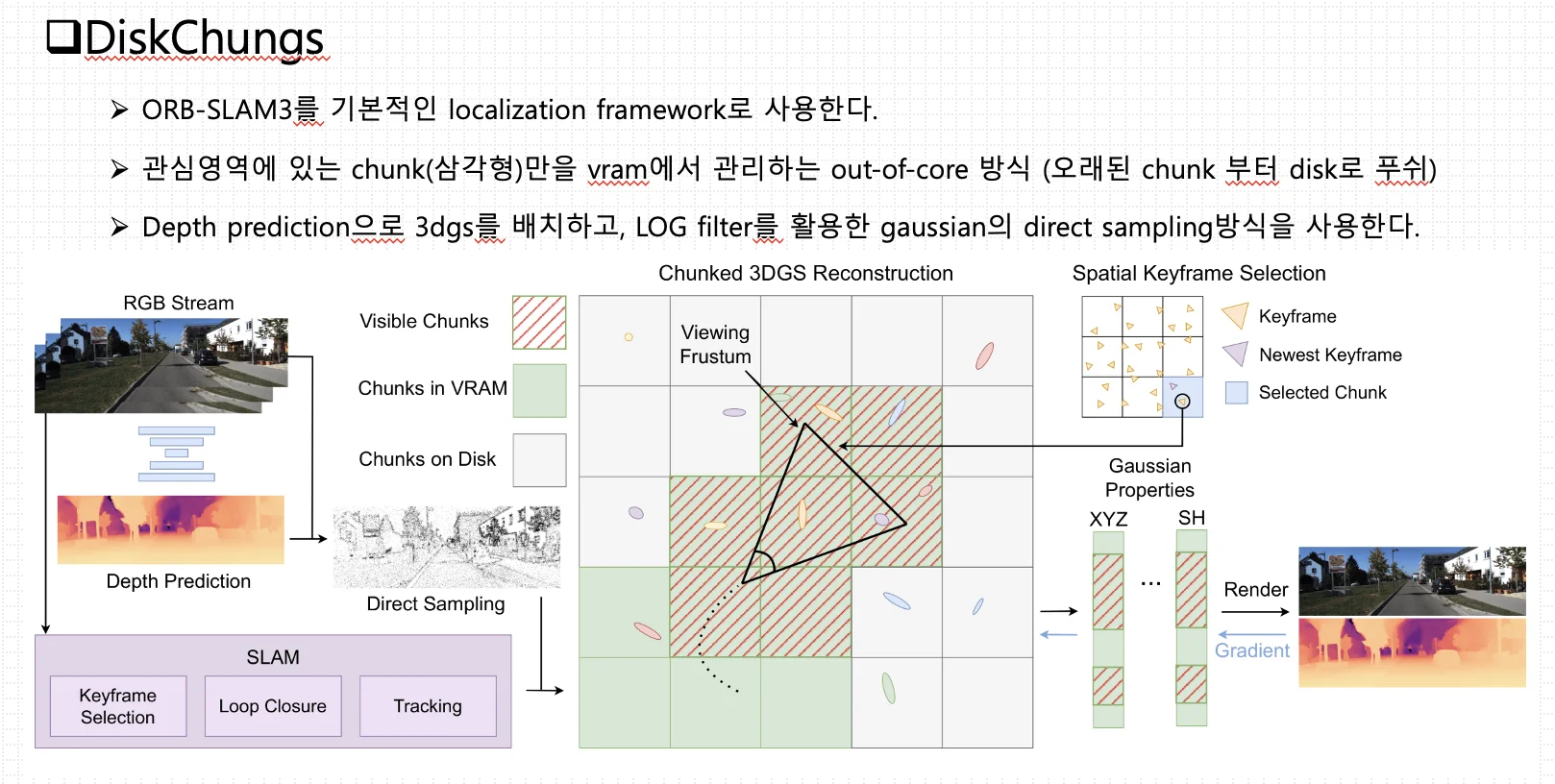
DiskChunGS
https://rffr.leggedrobotics.com/works/diskchungs/
- 교수님이 추천해주신 논문으로 google과 ETH의 RSL 연구실에서 나온 논문이다. 대표적은 특징은 아래와 같고 large scale의 scene을 메모리 효율적으로 mapping할 수 있도록 다양한 방법을 제시한다.
실험 결과
https://github.com/leggedrobotics/DiskChunGS

kitty dataset 같은 장거리 데이터셋에서 높은 성능을 보였다는게 이 논문의 주요 contribution인데.. 내가 실험해보았을때에는 이렇게 high quality의 결과물은 나오지 않았다,,
tum RGB-D dataset
- RGB-D dataset에서 rgb만을 이용하여 base pipeline을 돌려보았다,, 하지만 psnr은 22.08 정도로 퀄리티가 그렇게 좋지는 않다. 또한 논문에서 주장하는 direct sampling을 통한 세밀한 특징표현도 잘 이루어지지 않는 모습이다.. → 추후 원인 파악
konkuk mono dataset

- 내가 직접 iphone 4k video로 취득한 long sequence의 데이터셋이다.. 이 데이터셋은 orb-slam3에 필요한 캘리브레이션 파라미터가 없어서 중간에 계속 tracking이 끊겨 일부 데이터 셋만으로 진행하였다.
- 퀄리티가 초반에는 괜찮다가 tracking을 잃어버린 이후부터는 완전히 이상해지는것을 확인할 수 있다.
- 또한 동적물체(차량)의 영향을 받아 아티펙트가 남는 것 또한 확인할 수 있다.
zed camera (stereo) dataset
- 캘리브레이션 된 데이터셋이고 야외 풀숲에서 찍은 데이터 셋 이다.
- 하늘에 대한 영역을 잘 일반화 하지 못하는 것 같고 풀 숲이나 풀 밭에 대한 표현력도 많이 떨어진다.. → 원이파악 필요함. frame당 학습량이 문제일 수도 있고.. 최적의 학습 세팅을 찾아야할지도,,
FVDB & FVDB reality-capture
- FVDB는 sparse한 공간정보를 gpu에 효율적으로 표현하기 위한 프레임 워크이고 fvdb reality capture는 fvdb를 활용하여 3DGS, mesh generation등의 application을 할 수 있도록 모아놓은 프레임워크이다.
- 특징으로는 colmap 데이터 대신에 드론, 로봇, 차량 등에서 받아온 센서데이터(pointcloud, images, camera pose)를 받아 3dgs나 mesh generation등을 할 수 있다. → fvdb가 large scale에서 좋다고 하는 이유가 이것 때문인 듯 싶다. 다량의 데이터에서 한번에 위와같은 작업을 할 수 있도록 다양한 세팅을 조절할 수 잇을 것 같다.
실험 세팅
FVDB를 활용하기 위해서 odometry가 정확하게 나오는 모바일 로봇이 필요한데.. 내가 가지고 있는 당장 사용할 수 있는 로봇이 unitree go2밖에는 없다. 따라서 unitree go2의 센서데이터를 가지고 fvdb를 한번 사용해보기로 했다.
go2’s topic list
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
ros2 topic list
/api/assistant_recorder/request
/api/assistant_recorder/response
/api/audiohub/request
/api/audiohub/response
/api/bashrunner/request
/api/bashrunner/response
/api/config/request
/api/config/response
/api/fourg_agent/request
/api/fourg_agent/response
/api/gas_sensor/request
/api/gas_sensor/response
/api/gesture/request
/api/gpt/request
/api/gpt/response
/api/motion_switcher/request
/api/motion_switcher/response
/api/obstacles_avoid/request
/api/obstacles_avoid/response
/api/pet/request
/api/pet/response
/api/programming_actuator/request
/api/programming_actuator/response
/api/robot_state/request
/api/robot_state/response
/api/sport/request
/api/sport/response
/api/sport_lease/request
/api/sport_lease/response
/api/uwbswitch/request
/api/uwbswitch/response
/api/videohub/request
/api/videohub/response
/api/vui/request
/api/vui/response
/arm_Command
/arm_Feedback
/audiohub/player/state
/audiosender
~/camera/camera_info
/camera/image_raw~
~/cmd_vel
/cmd_vel_joy
/cmd_vel_out~
/config_change_status
/diagnostics
/frontvideostream
/gas_sensor
/gesture/result
/gnss
/go2_states
/gpt_cmd
/gptflowfeedback
/imu
/joint_states
/joy
/joy/set_feedback
/lf/lowstate
/lf/sportmodestate
/lio_sam_ros2/mapping/odometry
/lowcmd
/lowstate
/multiplestate
~/odom~ /parameter_events
/pctoimage_local
/pet/flowfeedback
/point_cloud2
/pointcloud/aggregated
/pointcloud/downsampled
/pointcloud/filtered
/programming_actuator/command
/programming_actuator/feedback
/public_network_status
/qt_add_edge
/qt_add_node
/qt_command
/qt_notice
/query_result_edge
/query_result_node
/robot_description
/rosout
/rtc/state
/rtc_status
/scan
/selftest
/servicestate
/servicestateactivate
/sportmodestate
/tf
/tf_static
/uslam/client_command
/uslam/cloud_map
/uslam/frontend/cloud_world_ds
/uslam/frontend/odom
/uslam/localization/cloud_world
/uslam/localization/odom
/uslam/navigation/global_path
/uslam/server_log
/utlidar/client_cmd
/utlidar/cloud
/utlidar/cloud_base
/utlidar/cloud_deskewed
/utlidar/grid_map
/utlidar/height_map
/utlidar/height_map_array
/utlidar/imu
/utlidar/lidar_state
/utlidar/mapping_cmd
/utlidar/range_info
/utlidar/range_map
/utlidar/robot_odom
/utlidar/robot_pose
/utlidar/server_log
/utlidar/switch
/utlidar/voxel_map
/utlidar/voxel_map_compressed
/uwbstate
/uwbswitch
/videohub/inner
/webrtc_req
/webrtcreq
/webrtcres
/wirelesscontroller
/wirelesscontroller_unprocessed
/xfk_webrtcreq
/xfk_webrtcres
- 사실 위에는 기본적으로 나오지 않는 ros topic까지도 섞여있다. 나중에 제대로 된 토픽 list를 올리도록 하겠다. 내가 수집한 토픽은 아래와 같다.
- /utlidar/robot_odom : unitree go2의 내장 lidar, imu, 다리 움직임을 통합하여 계산한 오도메트리이다. 아마 로봇 본체의 흔들림을 최소화 하였을 것 같다.
- /frontvideostream : unitree ros2 msg 형태로 비디오 스트림이 인코딩되어서 들어온다. 720p, 360p, 180p의 영상이 stream으로 들어온다. (Annex-B 형태의 H.264 인코딩 비디오 payload)
- /utlidar/cloud_deskewed : go2내부에서 돌아가는 slam map의 완성본을 저장하는 cmd를 찾지 못해서..이런 deskew 되고 있는 라이다 포인트를 받아와서 Odom에 맞추어 중첩해주었다..이렇게 임시방편으로 진행해서 그런지 결과가 썩 좋지는 않다..
실험 결과
lidar camera calibration

- 먼저 데이터셋에서 lidar와 카메라의 extrinsic을 한번 맞추어보았다. 보이는대로 조금씩 틀어져있는것을 확인할 수 있다.. 만약 제대로 fvdb를 활용하려면 아마 cailbration을 다시 맞추어야 할 것 같다.
1
2
3
4
5
6
7
8
9
10
11
12
## camera urdf
<joint name="front_camera_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.32715 -0.00003 0.04297" />
<parent link="base" />
<child link="front_camera" />
</joint>
## lidar urdf
<joint name="radar_joint" type="fixed">
<origin xyz="0.28945 0 -0.046825" rpy="0 2.8782 0" />
<parent link="base" />
<child link="radar" />
</joint>
따라서 라이다에서 카메라 로의 수식은 아래와 같다.
T_camera_radar = inverse(T_base_camera) × T_base_radar
\[T_{CR}=T_{CB}^{-1}\times T_{BR}\]
- 아티펙트도 많고.. fvdb에 사용하기 위해서는 undistort과정을 거치게 되는데.. 카메라의 intrinsic을 내가 남의 go2것으로 사용해서 그런 것 같다..
추후 시도 및 생각
- 아무래도 fvdb는 robot system의 정교함에 camera pose를 기대는 만큼 정교한 calibration과 계획적인 실험이 필요할 것 같다.
- go2 robot의 camera & lidar calibration필요
- fvdb 의 최적의 학습 spot 찾기
- 계획적인 데이터셋 취득
- DiskChunGS와 Loger와 같은 large scale에서의 카메라 only (mono, stereo)방법을 계속 시도해볼지 아니면 fvdb를 신뢰할지 계획 수정필요
- 실내 8층 건물을 복원하는걸 milestone으로 잡는 것.
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.