Intel realsense & mid360s ROS2 installation
Intel realsense & mid360s ROS2 installation
Livox SDK installation
https://github.com/Livox-SDK/Livox-SDK2
- livox sdk2는 Mid-360s까지 지원한다.
설치
1
2
3
4
5
6
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j4 ## jetson에서는 빌드를 원활히 하기 위해서 core의 수를 제한한다.
sudo make install
예제 실행
- 예제의 config file의 lidar_ip를 나의 lidar의 ip로 수정합니다. 이때 기본적으로 lidar의 시리얼 넘버의 맨 마지막 두자리수가 lidar의 ip 주소가 됩니다. 제꺼는 44로 끝났기 떄문에 192.168.1.144가 됩니다.
- (이미지는 다른 블로그에서 긁어왔습니다.)
1
2
3
4
5
6
7
# lidar ip 수정
nano /path/to/Livox-SDK2/samples/livox_lidar_quick_start/mid360s_config.json
cd /path/to/livox-SDK2
# 패킷이 들어오는지 확인합니다.
./build/samples/livox_lidar_quick_start/livox_lidar_quick_start samples/livox_lidar_quick_start/mid360s_config.json

- 먼저 위에 것을 진행하기 전에 내 host pc의 ip에 192.168.1.x와 소통할 수 있는 프로파일을 생성합니다.
1
sudo ip addr add 192.168.1.5/24 dev eno1 #저는 기존에 있던 프로파일인 eno1에 추가하였습니다.
livox ros2 driver installation
- 저는 jetson에 humble을 미리 설치한 후에 진행하였습니다. https://github.com/Livox-SDK/livox_ros_driver2.git
1
2
3
4
5
6
7
8
9
10
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
./build.sh humble
cd /path/to/ws_livox
source install/setup.bash
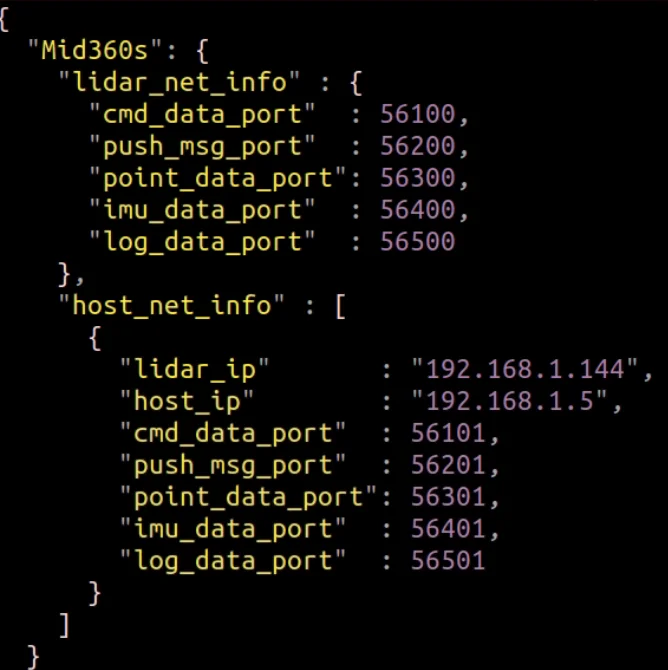
# 여기서 ip setting을 아래와 같이 변경
vim install/livox_ros_driver2/share/livox_ros_driver2/config/MID360s_config.json
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
{
"lidar_summary_info" : {
"lidar_type": 8
},
"Mid360s": {
"lidar_net_info" : {
"cmd_data_port" : 56100,
"push_msg_port" : 56200,
"point_data_port": 56300,
"imu_data_port" : 56400,
"log_data_port" : 56500
},
"host_net_info" : [
{
"host_ip" : "192.168.1.5",
"cmd_data_port" : 56101,
"push_msg_port" : 56201,
"point_data_port": 56301,
"imu_data_port" : 56401,
"log_data_port" : 56501
}
]
},
"lidar_configs" : [
{
"ip" : "192.168.1.144", // 내 lidar ip
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
}
}
]
}
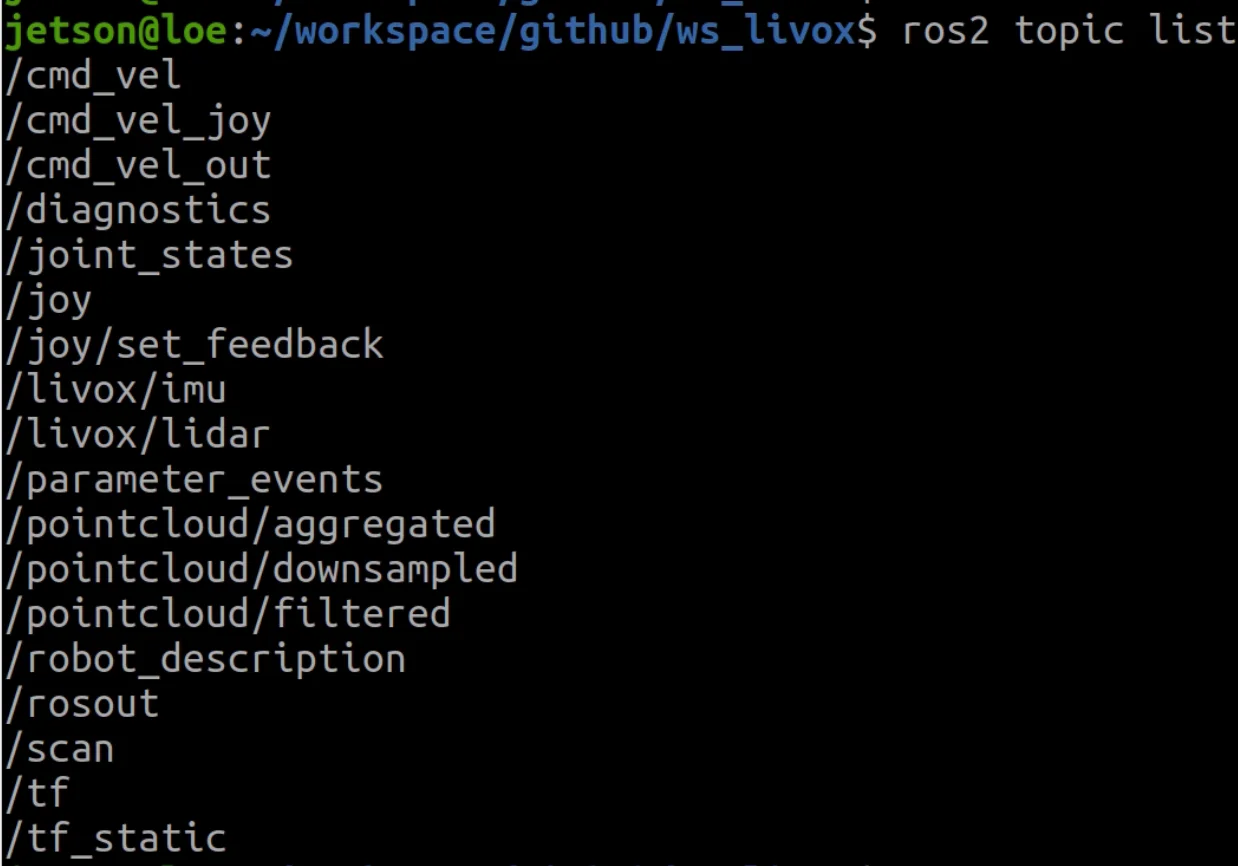
이렇게하고 launch 파일을 실행하면 ros2 topic이 잘 나오는 것을 확인할 수 있습니다.
1
2
3
ros2 launch livox_ros_driver2 rviz_MID360s_launch.py
ros2 topic list
intelrealsense 설치
- 이분이 jetson관련된 컨텐츠를 상당히 많이 찍으시는데 나는 그냥 믿고 본다 5:18 초부터의 설치내용을 따랐다.
realsense에 맞는 커널 빌드 (jetpack 6.2 미포함)
1
2
3
4
5
6
7
8
9
10
11
git clone https://github.com/jetsonhacks/jetson-orin-librealsense.git
cd jetson-orin-librealsense
sha256sum -c install-modules.tar.gz.sha256
tar -xzf install-modules.tar.gz
cd install-modules
sudo ./install-realsense-modules.sh
- 커널 모듈을 깔면 이러한 장점이 있다고 한다.
- 심층 프레임 형식 지원(Depth-related streaming formats): RealSense 카메라의 고유한 깊이(Depth) 데이터를 원활하게 스트리밍할 수 있도록 커널 수준에서 호환성을 확보합니다.
- 프레임 메타데이터 접근(Per-frame metadata attributes): 프레임마다 포함된 상세 정보를 추출할 수 있게 되어, 더 정밀한 AI 비전 처리가 가능해집니다
- IMU 센서 지원: 가속도계와 자이로스코프(Gyroscope) 같은 관성 측정 장치(IMU)를 시스템이 인식하고 사용할 수 있도록 합니다. 이 모듈들이 없으면 카메라의 모션 데이터를 활용할 수 없습니다.
- 네이티브 성능 최적화: 커널 수준에서 드라이버를 직접 패치하고 로드하기 때문에, 프로덕션 환경에서 가장 안정적이고 높은 성능을 기대할 수 있습니다.
1
2
3
4
5
6
7
8
9
10
11
12
13
# gpg key add
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys FB0B24895113F120
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
# intelrealsense 설치
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt install ros-humble-librealsense2*
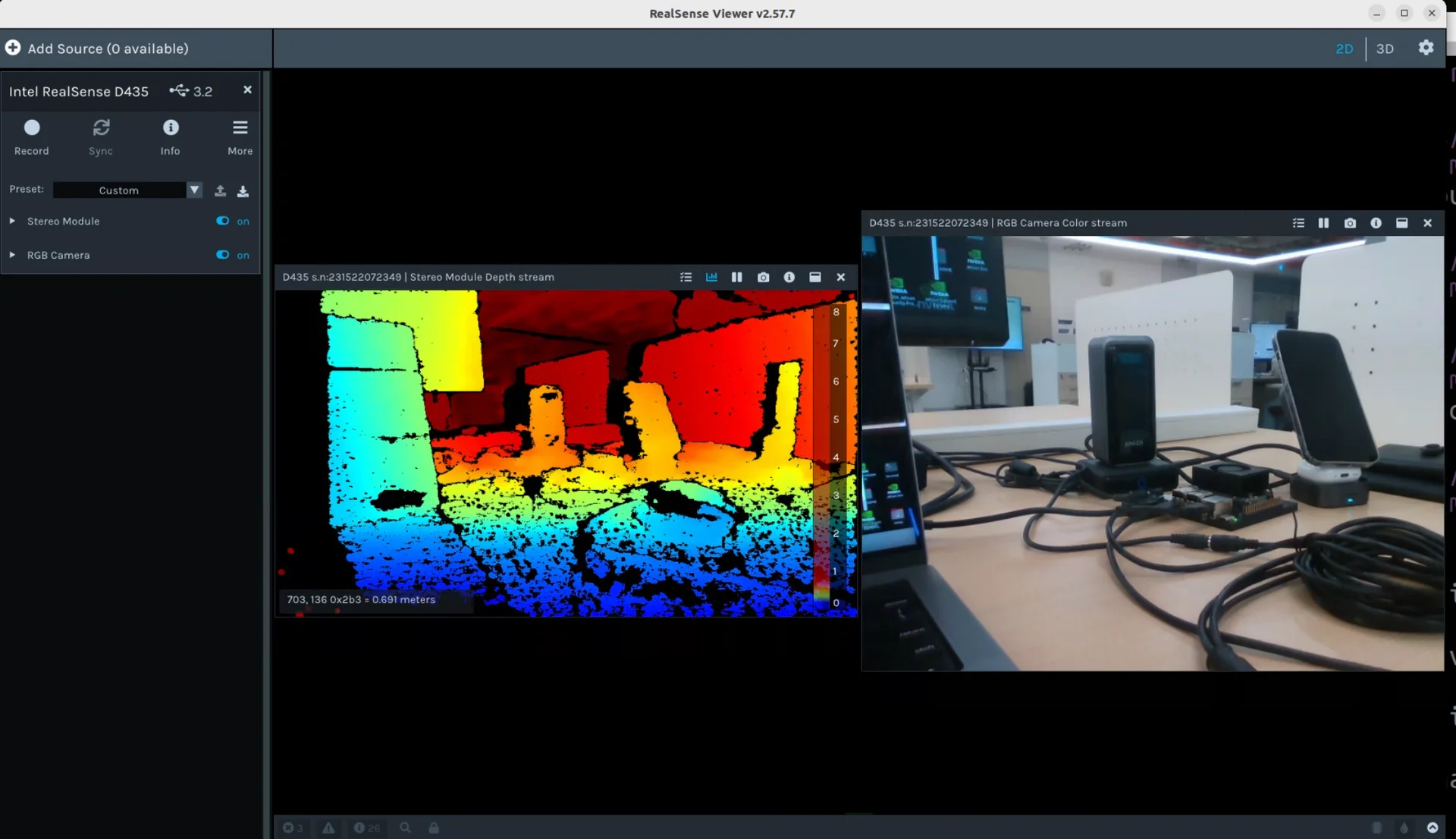
# viewer로 firmware update & 장치 인식
realsense-viewer
ros2 launch realsense2_camera rs_launch.py
이 기사는 저작권자의 CC BY 4.0 라이센스를 따릅니다.