9월 15일 - 마지막 실험
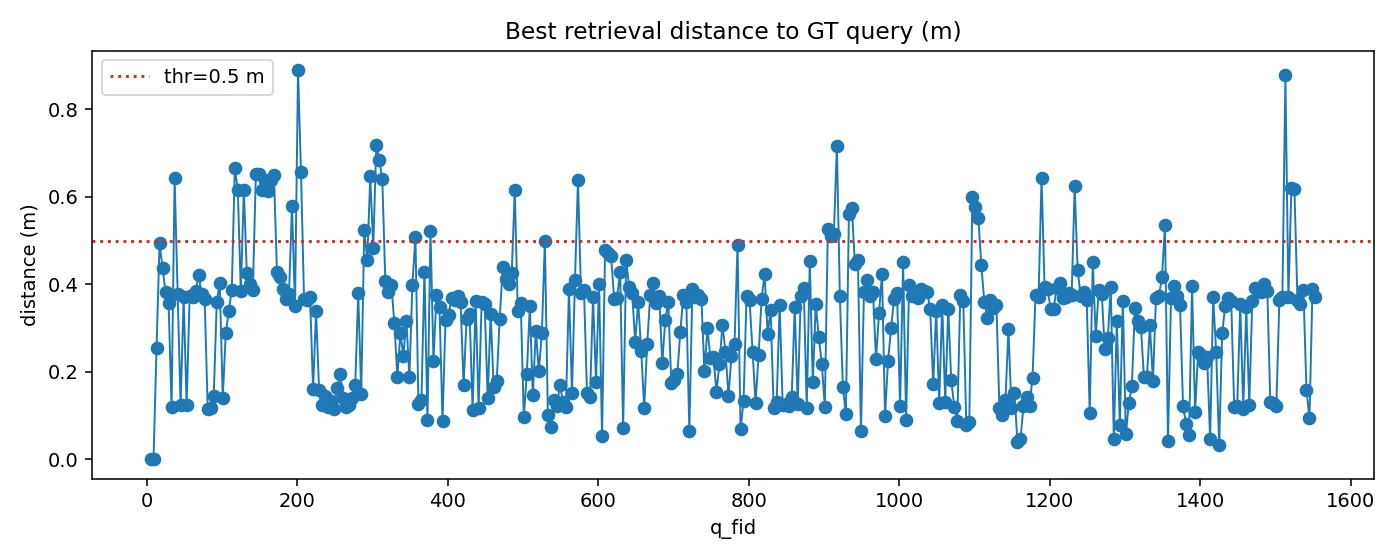
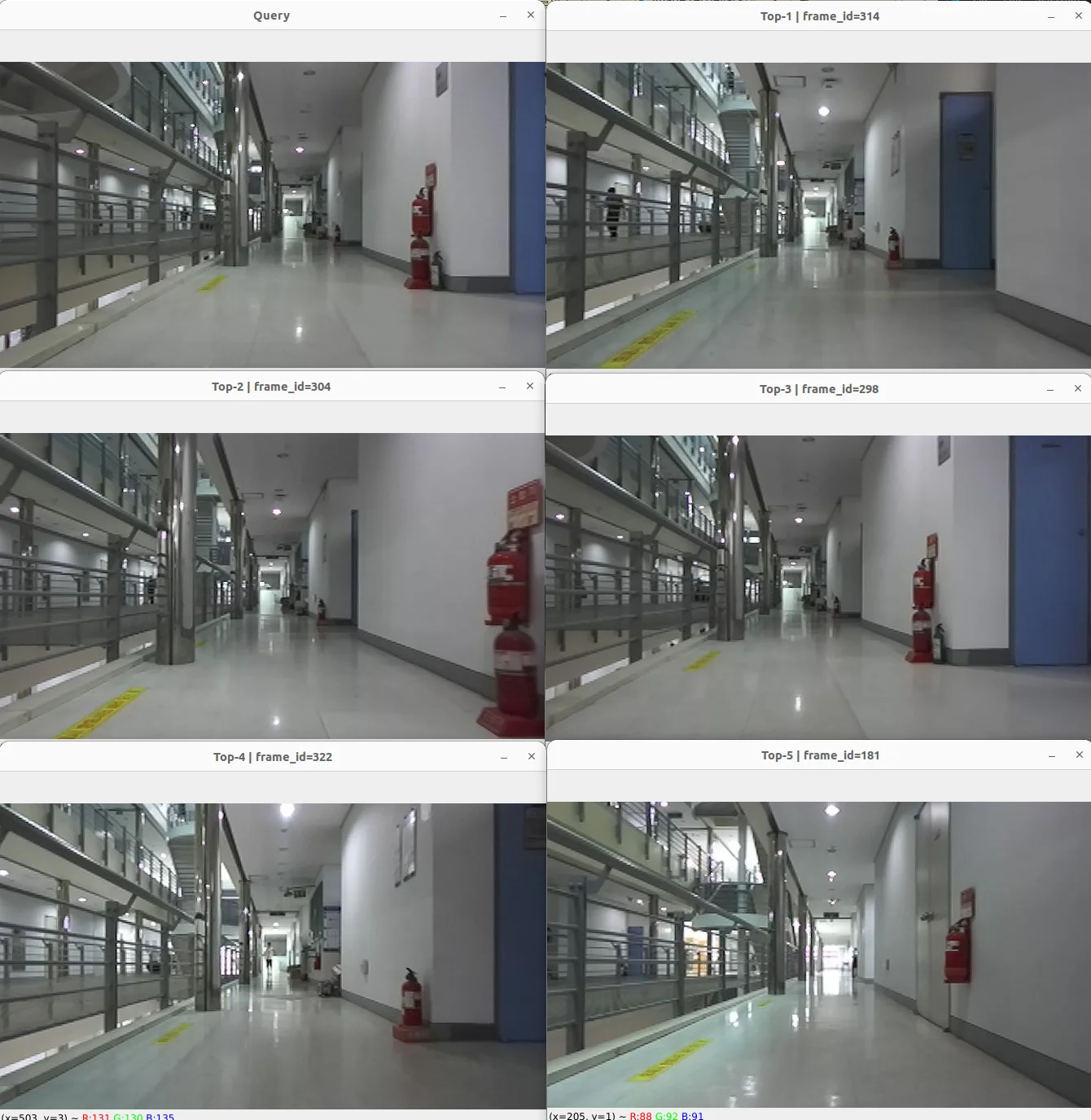
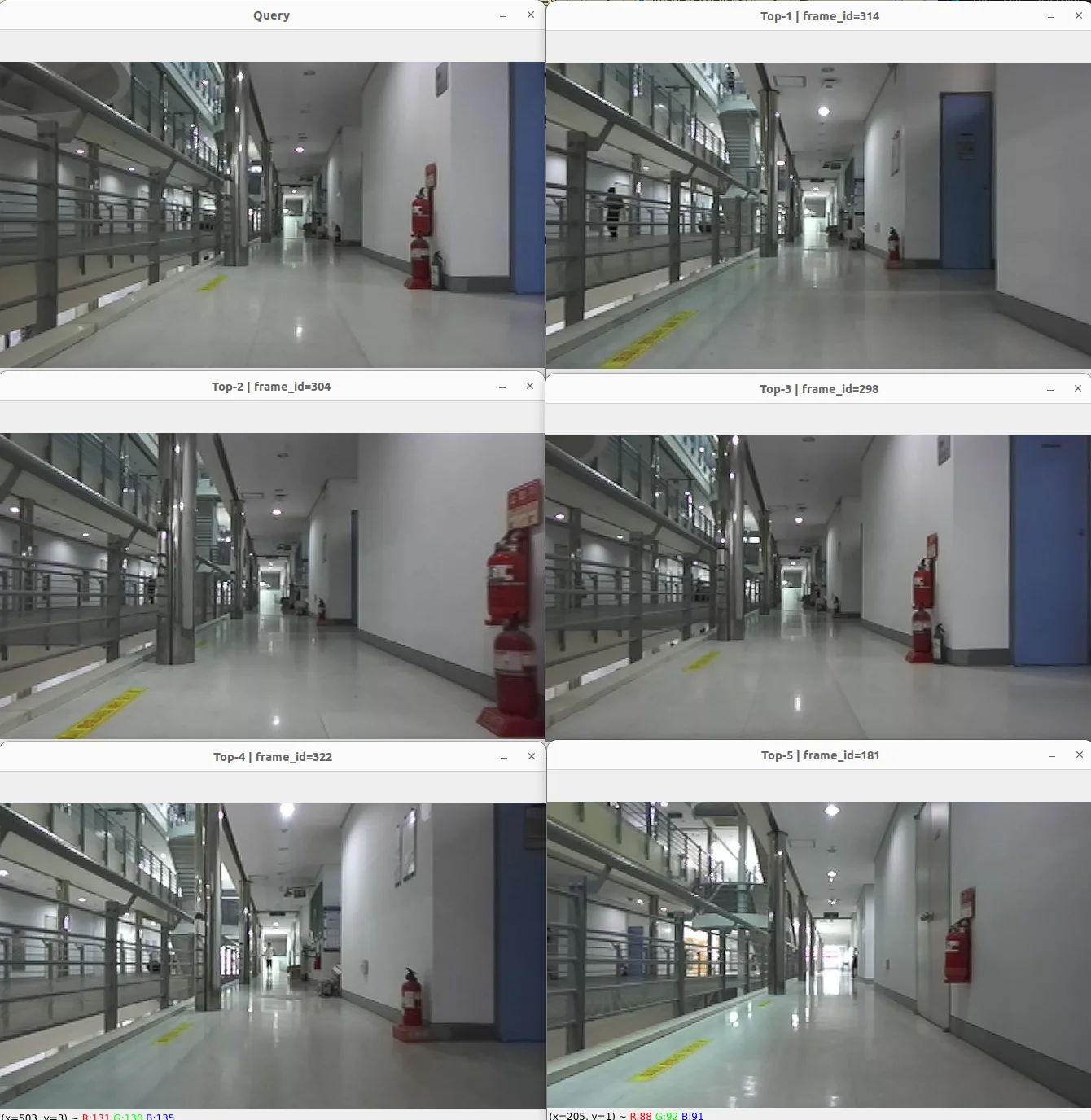
Experiment 실내 best retrieval worst retrieval Rotation error Translation error 실외 Best retrieval Worst retrieval Translation error
Experiment 실내 best retrieval worst retrieval Rotation error Translation error 실외 Best retrieval Worst retrieval Translation error
VGGT 제거 & gaussian map based refine VGGT로 init pose를 만드는 것은 카메라 pose의 성능을 높이는데 매우 도움이 될 수 있지만 매우 무겁고 일반화용으로 학습된 모델에 의존하게 될 수 있다. 반면 gaussian map 을 base로 카메라 pose R,t를 refine하게 되면 현재 맵에 딱 맞는...
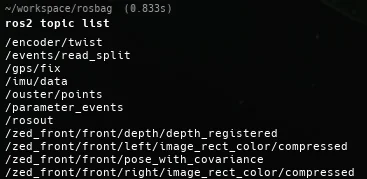
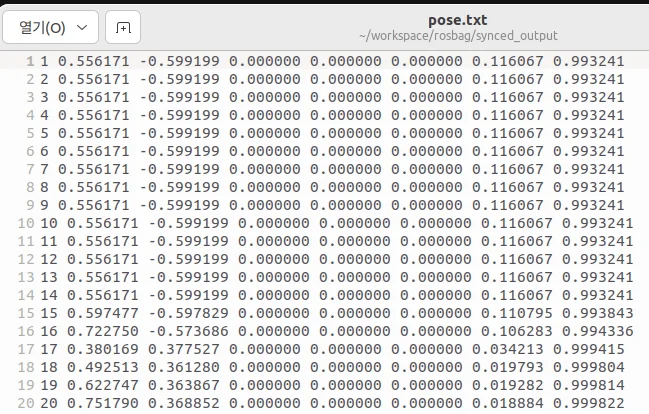
ROS bag 분석 left_compressed image와 /depth , /pose 를 추출하여 디렉토리에 저장 convert.py #!/usr/bin/env python3 # -*- coding: utf-8 -*- import os import cv2 import numpy as np from collections imp...
superpoint + superglue 기능 추가 HLOC (Hierarchical-Localization) [extract.py](http://extract.py/) (super point 추출) @torch.no_grad() def _extract(self, img_bgr: np.ndarray): ""...
extrinsic calibration이란? 💡 https://github.com/koide3/direct_visual_lidar_calibration?tab=readme-ov-file 카메라와 라이다의 상대적인 거리를 찾기 위한 변환 처리 과정이다. input : 카메라 image와 info, 3d...

Camera Calibratin calibration 이란? 💡 카메라의 초점거리, 왜곡 계수, 가로세로 길이등을 알아내기 위한 방법으로 보통 체커보드나 april grid등의 미리 사이즈가 어떻게 되어있는지를 알고있는 보드를 사용하여 수행한다. 나의 경우에는 10 x 10에 한칸의 길...
Idea Dinov2의 이미지 순수 이미지 feature로 top k 검색 Top K image의 sift descriptor 생성 후 feature 추출 2d - 2d correspondence를 이용해서 essential matrix 를 추출 한 후 epipolar 기하학을 만족시키는 점을을 inlier, 임계값 보다 만족하지 못하...
질문 김정탁 연구원님 : vggt랑 wildgs slam 좌표계의 scale, rotation을 어떻게 구하나 내가 알기로는 vggt는 m단위의 좌표계가 아닌걸로 알고 있다. m좌표계가 아니지만 map좌표계로 카메라 좌표간의 길이 차이를 구해서 scale을 구한다. 권흥찬 연구원님 : wildgs 좌표계와 vggt 좌표계간의 변환 과...
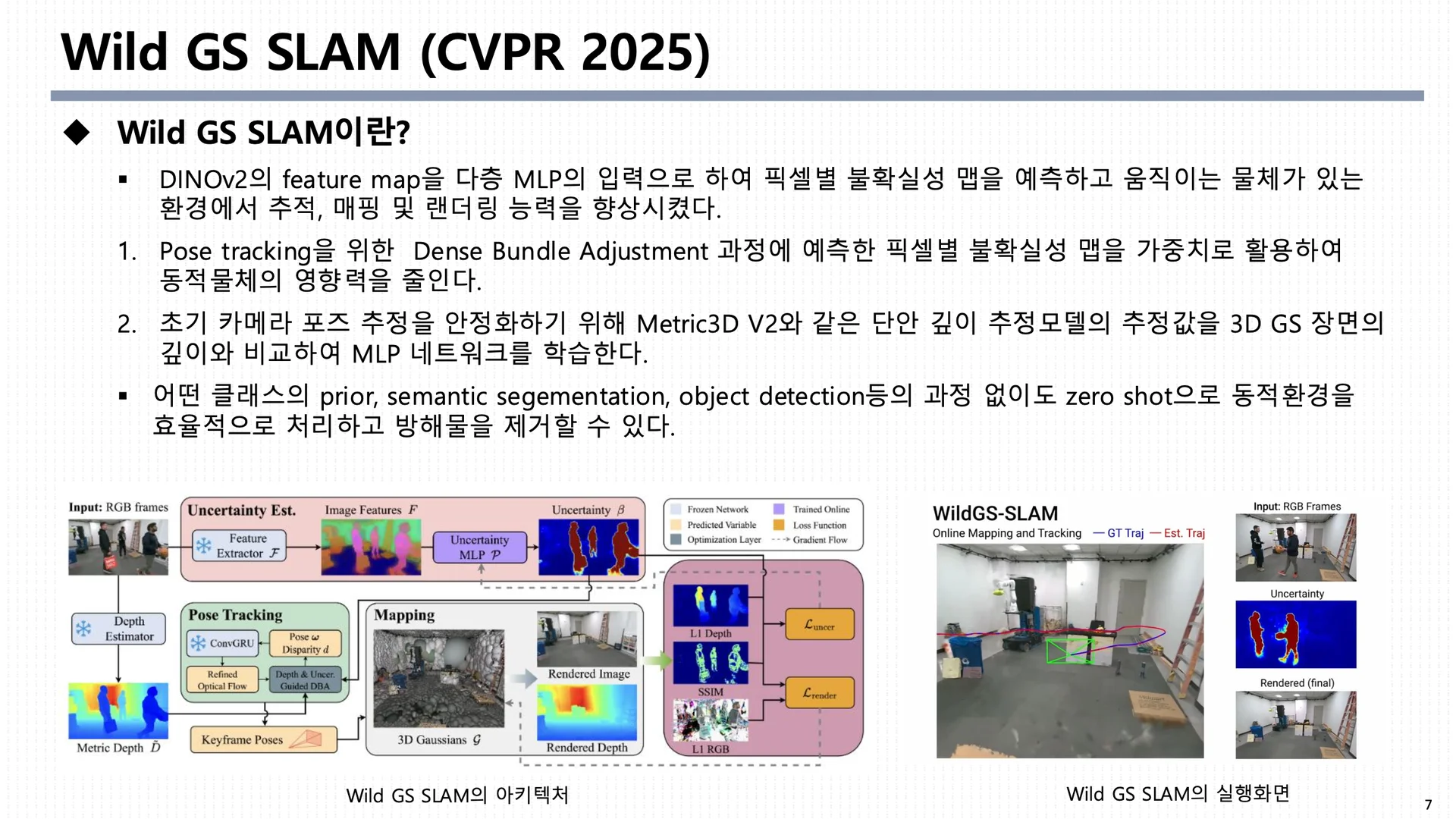
단점 slam map 생성시에 많은 리소스가 필요하다. map 생성시에 scene이 너무 넓어지면 ram 용량이 감당하지 못할 수 도 있다. 예상 해결책 : WildGS 실행 과정에서 mono depth estimation 하는 과정을 depth camera로 대체한다. ...
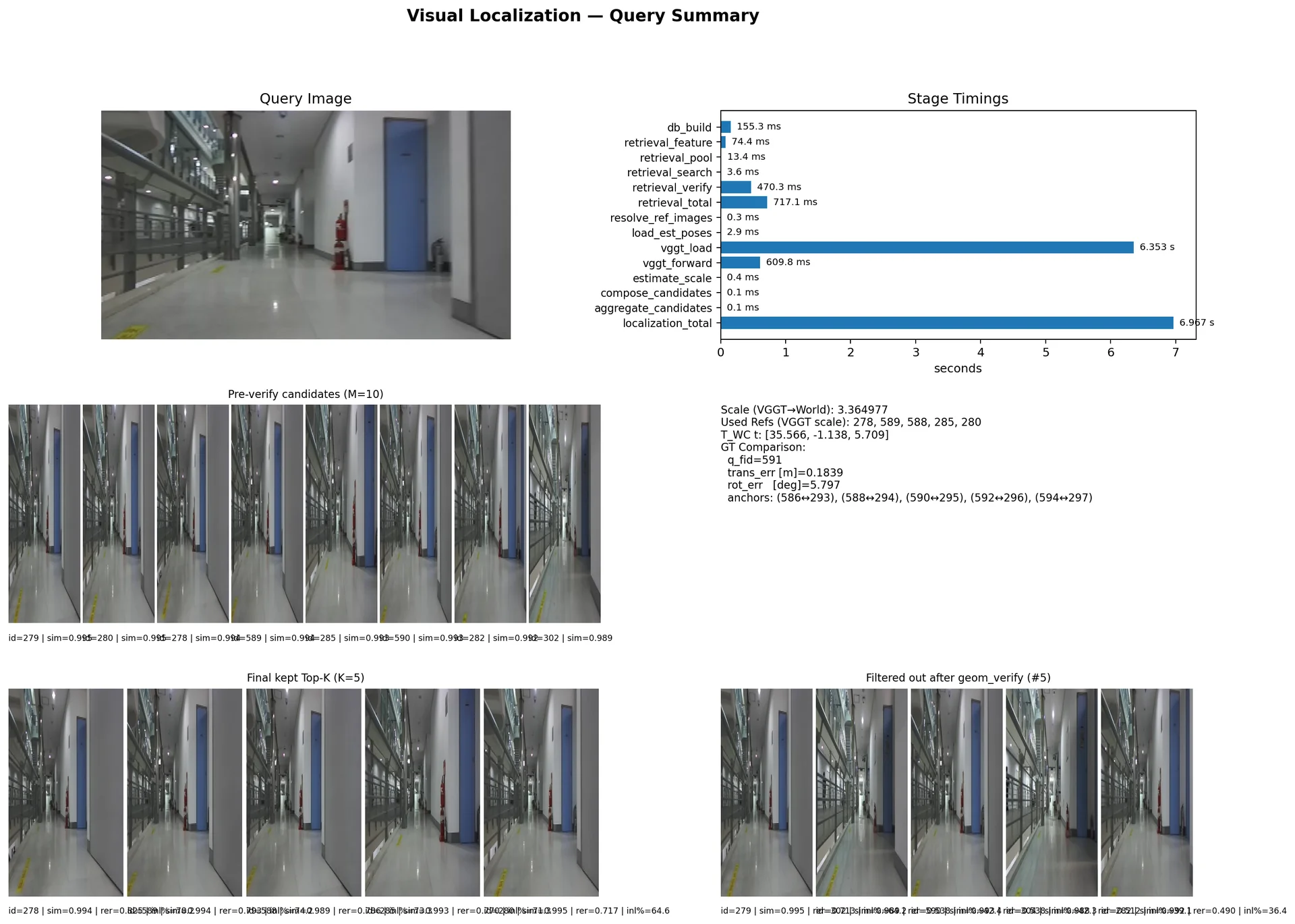
run_vis.py, visual_localization.py # run_vis.py import argparse import os import sys import cv2 import torch import torch.nn.functional as F import numpy as np from src import config # VisualLo...