
[Unist 복원 프로젝트] Part 9. dense lidar dataset
현재 상황 현재 상황은 lidar slam (fast-livo2)가 겉보이게는 정확해 보이지만 pose를 colmap의 pose와 비교해볼때 distance에는 2~6cm의, rotation에서는 2~3 도의 평균적인 오차가 있는 것을 확인하였다. 이러한 얼핏 보기에는 작아보이는 오차만으로도 3DGS 결과물에는 차이가 많이 발생하는 것을 확인하...
현재 상황 현재 상황은 lidar slam (fast-livo2)가 겉보이게는 정확해 보이지만 pose를 colmap의 pose와 비교해볼때 distance에는 2~6cm의, rotation에서는 2~3 도의 평균적인 오차가 있는 것을 확인하였다. 이러한 얼핏 보기에는 작아보이는 오차만으로도 3DGS 결과물에는 차이가 많이 발생하는 것을 확인하...
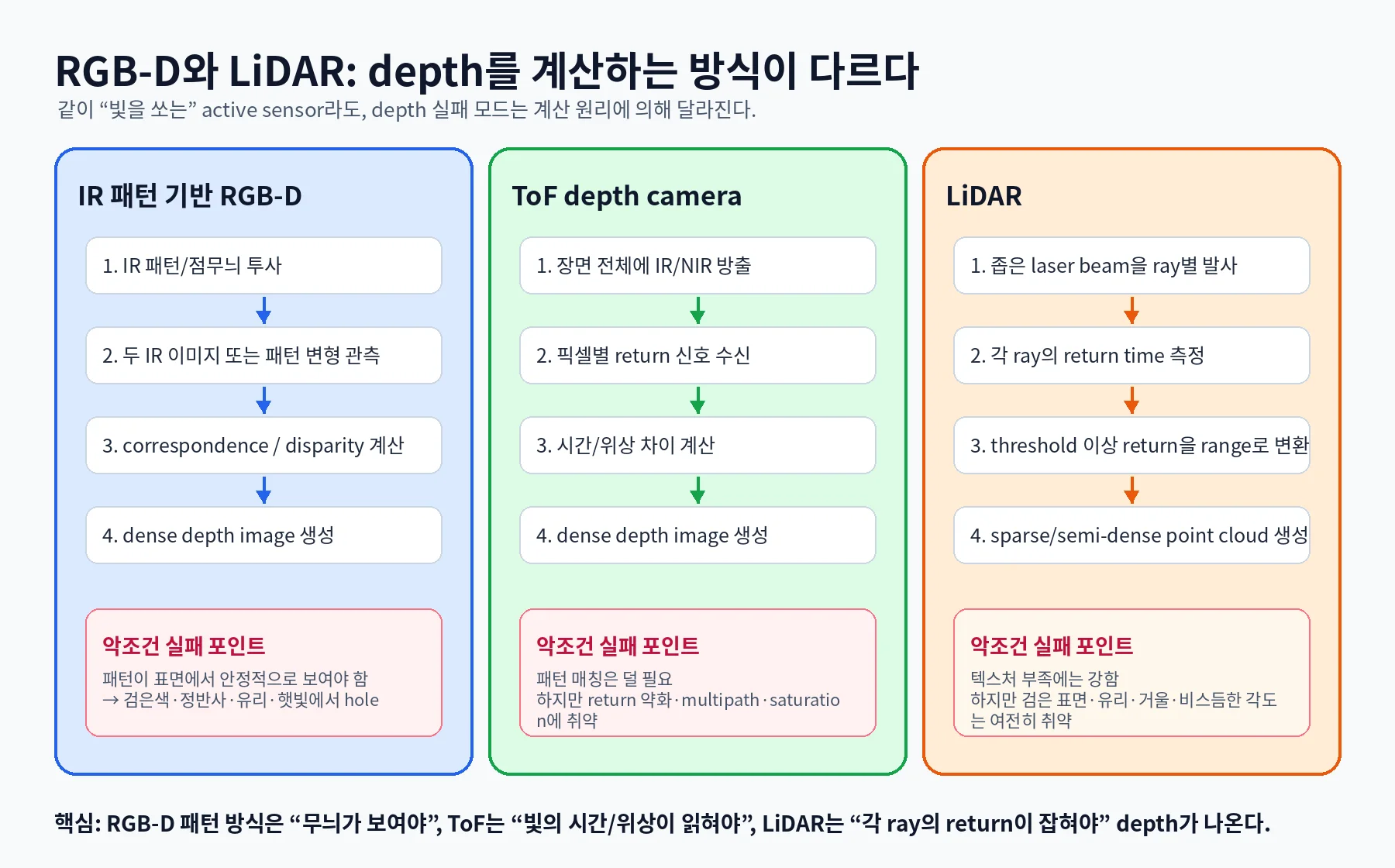
RGB-D depth camera와 LiDAR는 악조건에서 왜 다르게 무너지는가 🔦 핵심은 둘 다 빛을 쓰지만 depth를 계산하는 방식이 다르다는 점이다. IR 패턴 기반 RGB-D는 “패턴이 보여야” 하고, ToF depth camera는 “빛의 시간/위상이 읽혀야” 하며, LiDAR는 “각 레이저 ray의 return이 잡혀...
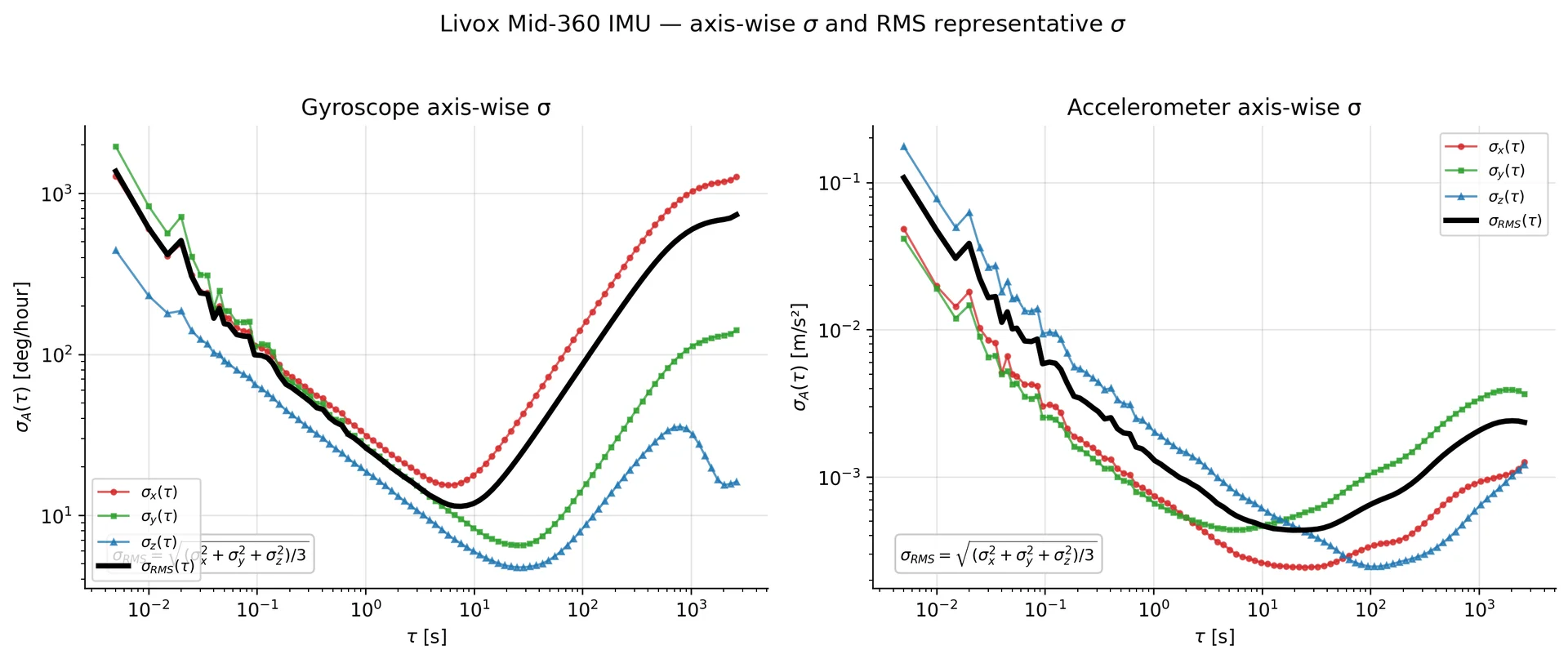
IMU quality 분석 IMU의 퀄리티를 분석하는 것으로는 크게 정적 분석과 동적인 분석으로 나눌 수 있게 된다. 정적인 분석으로는 아래와 같은 분석이 있다. 정적분석 노이즈 레벨(White Noise) 확인: 움직임이 전혀 없는데도 가속도나 자이로 값이 계속 변한다면 노이즈가 심한 것이다.. 보통 raw 데이터를 그래프(Plot)로 띄워...
mac에 ubuntu 설치법 지금까지 linux를 mac에 설치하려면 UTM같은 Virtual machine을 사용하거나 docker 를 활용해야 했다. 하지만 VM ware는 cpu나 ram 자원 자체를 할당해줘야 했기 때문에 장기적으로 활용하기는 아쉬었다. 또한 커널이 하드웨어와 완전히 호환되지 않아서 카메라나 라이다 같은 센서를 붙이고 싶은 나...
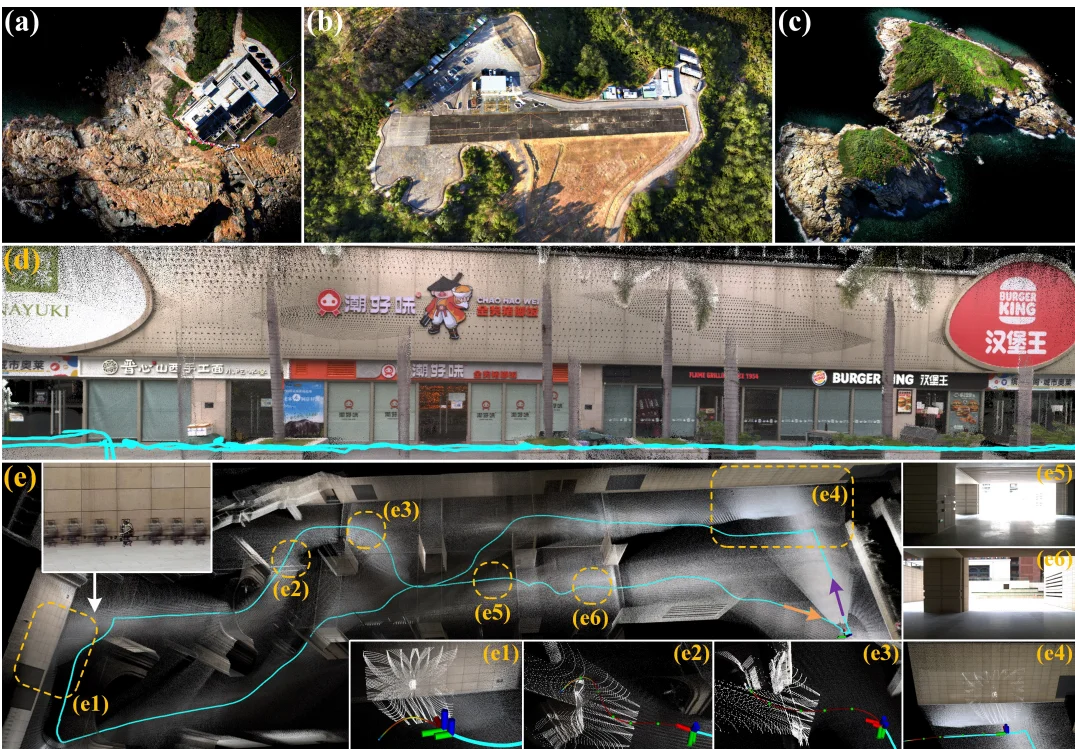
Fast-livo란? Lidar-Inertial-Visual slam으로써 매우 강건하게 작동하는 slam이다. FAST-LIVO2는 LiDAR, 카메라, IMU 데이터를 단일 통합 복셀 맵에 실시간으로 결합하여 드론과 같은 로봇이 극한 환경에서도 정확하게 위치를 잡고 3D 지도를 그리게 해주는 고속 SLAM 시스템이다. 특징 추출 없이 ...
데이터 동기화 데이터 동기화란 여러가지 센서 값을 한번에 처리할때 외부에서 harware trigger를 지원하는 센서같은 경우에는 하나의 MCU로 외부 입력을 주어 동일한 시간에 센서가 값을 내보내도록 할 수 있다. 나같은 경우에 사용하는 mid360s나 d455, hikrobot같은 머신비전 카메라는 외부 트리거를 지원한다. line c...
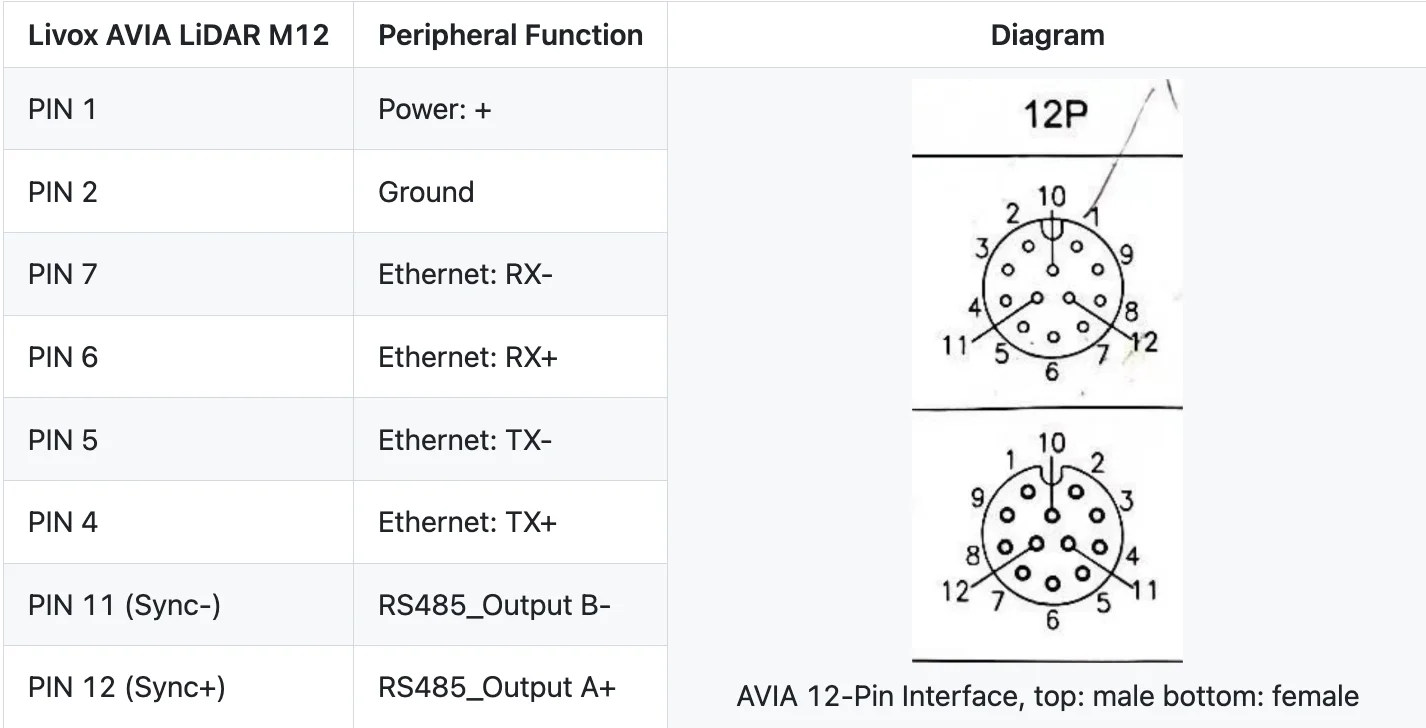
Sensor & Rig mid 360s 고정형 라이다로 회전형라이다와 다르게 비 반복적인 pattern이 나타나는 것이 특징이다. livox sdk2, ros2 패키지를 설치하여 토픽을 확인할 수 있으며 PTP와 외부 line을 통해 데이터 동기화를 지원한다. D435f intel realsense의 depth cam...
Livox SDK installation https://github.com/Livox-SDK/Livox-SDK2 livox sdk2는 Mid-360s까지 지원한다. 설치 git clone https://github.com/Livox-SDK/Livox-SDK2.git cd ./Livox-SDK2/ mkdir build cd build cm...
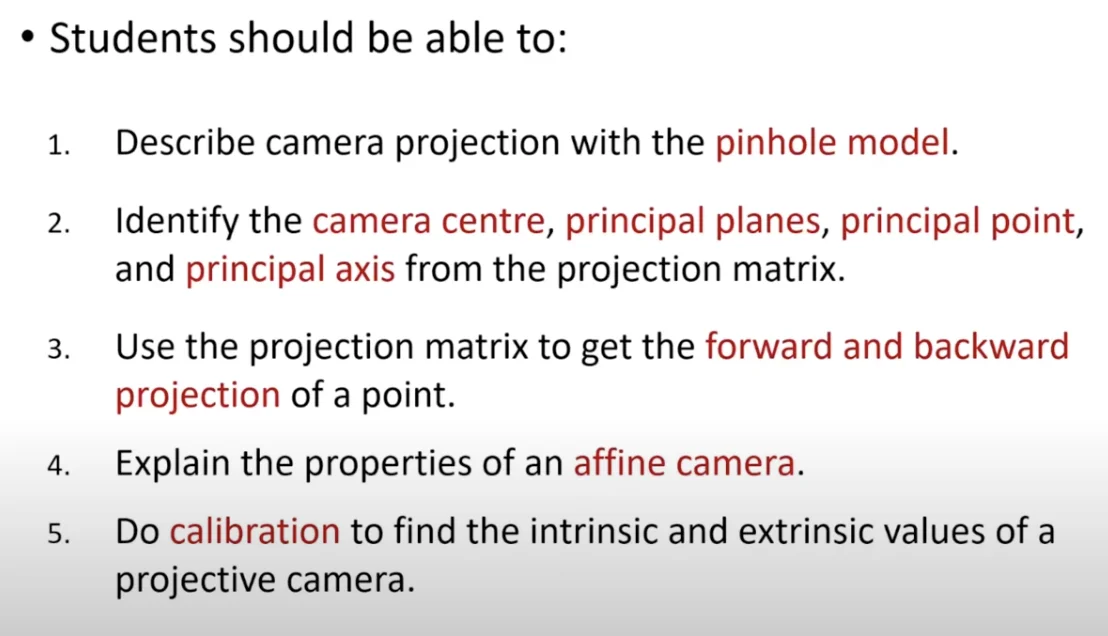
Camera models and calibration Learning Outcomes ❗ pinhole모델의 카메라 projection projection matrix에서의 카메라 중심, principal planes, principal point, principal axis등의 개념 ...
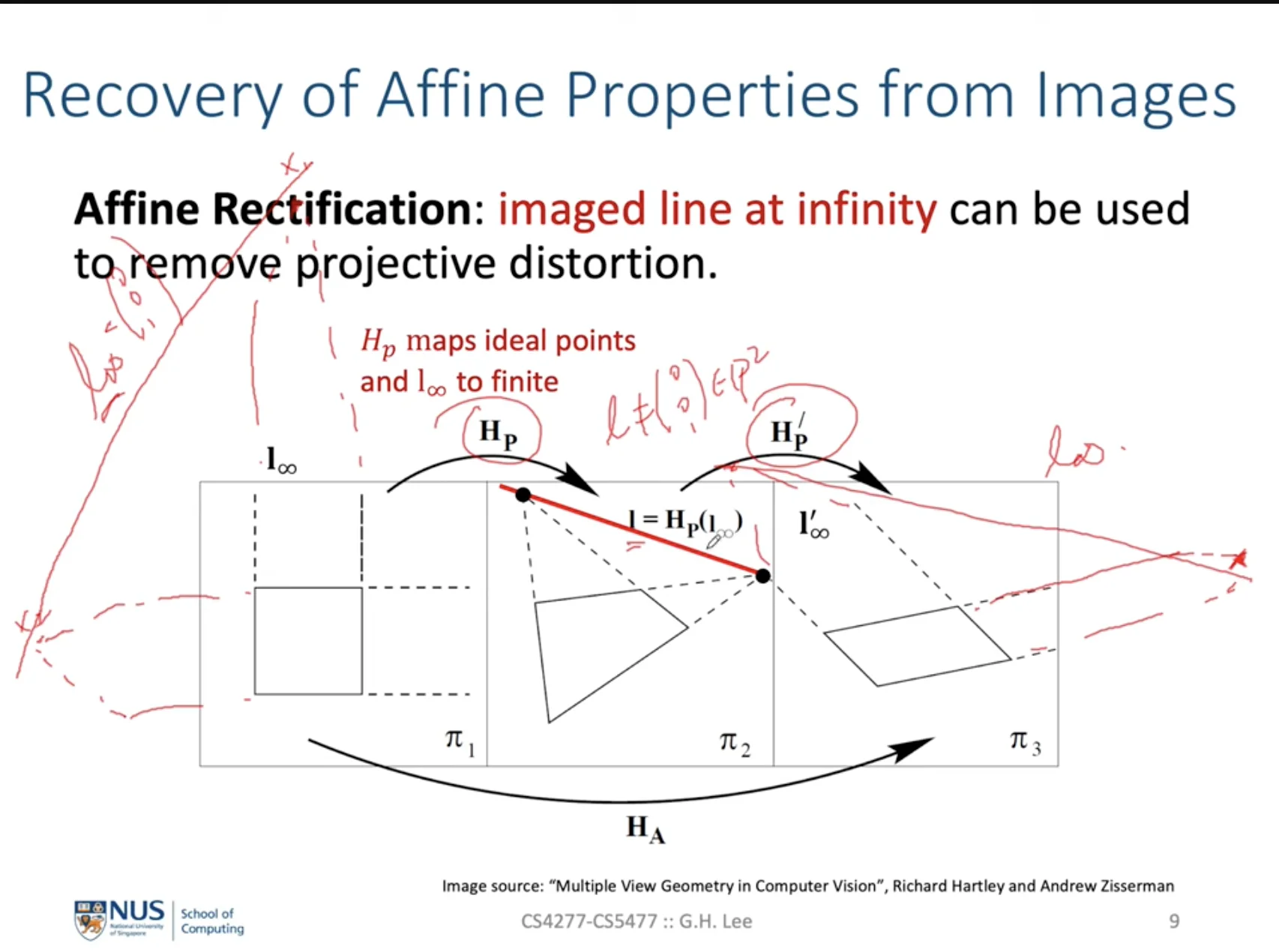
💡 Affine rectification과 metric rectification task에 대해서 설명한다. Affine rectification task를 위해 line at infinity의 정의와 이것을 이용하는 방법을 배운다. Metric rectification task를 위해 circular ...